
深度图像获取方法、设备和存储介质.pdf

悠柔****找我

1/10
2/10
3/10
4/10
5/10
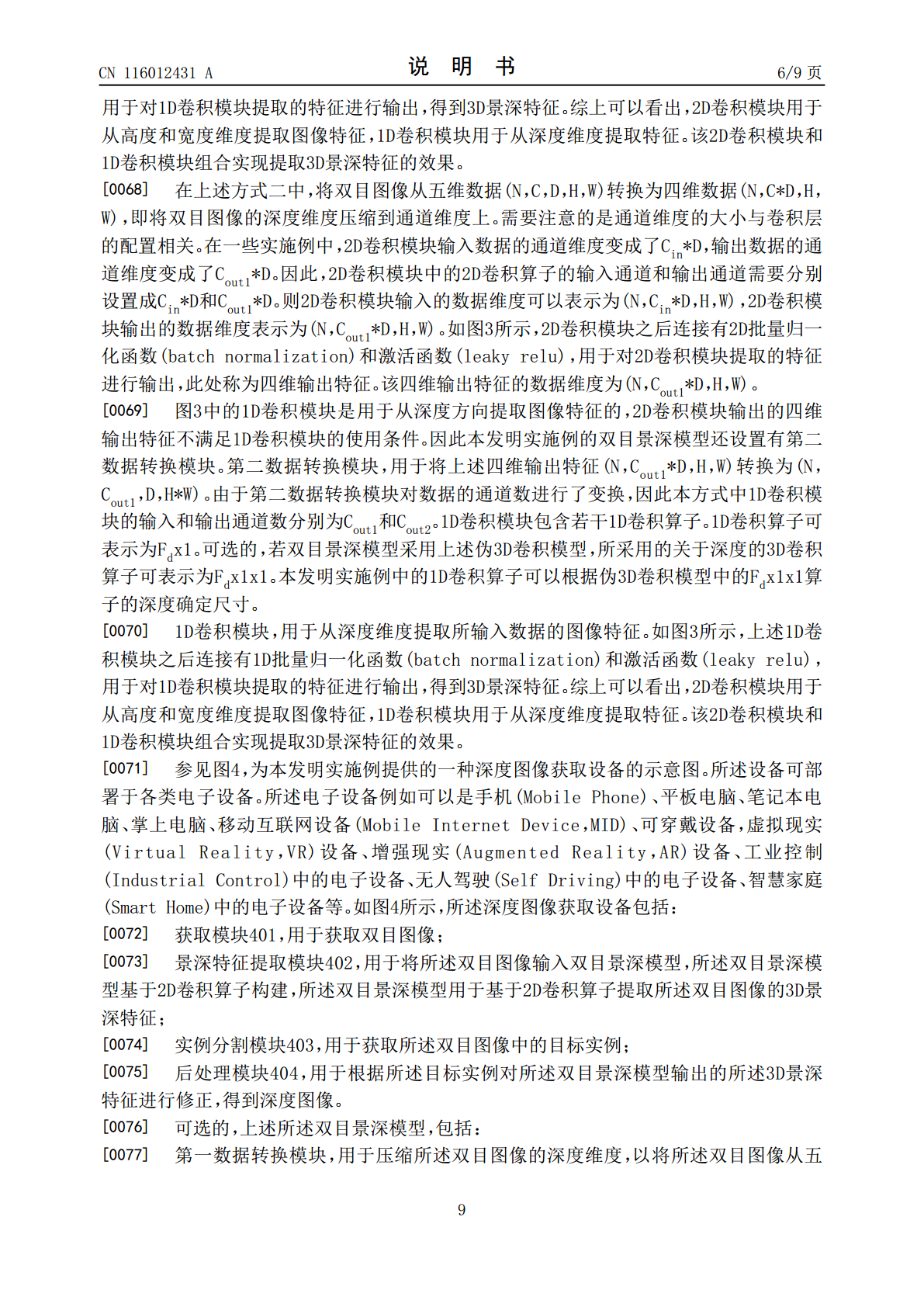
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
深度图像获取方法、设备和存储介质.pdf
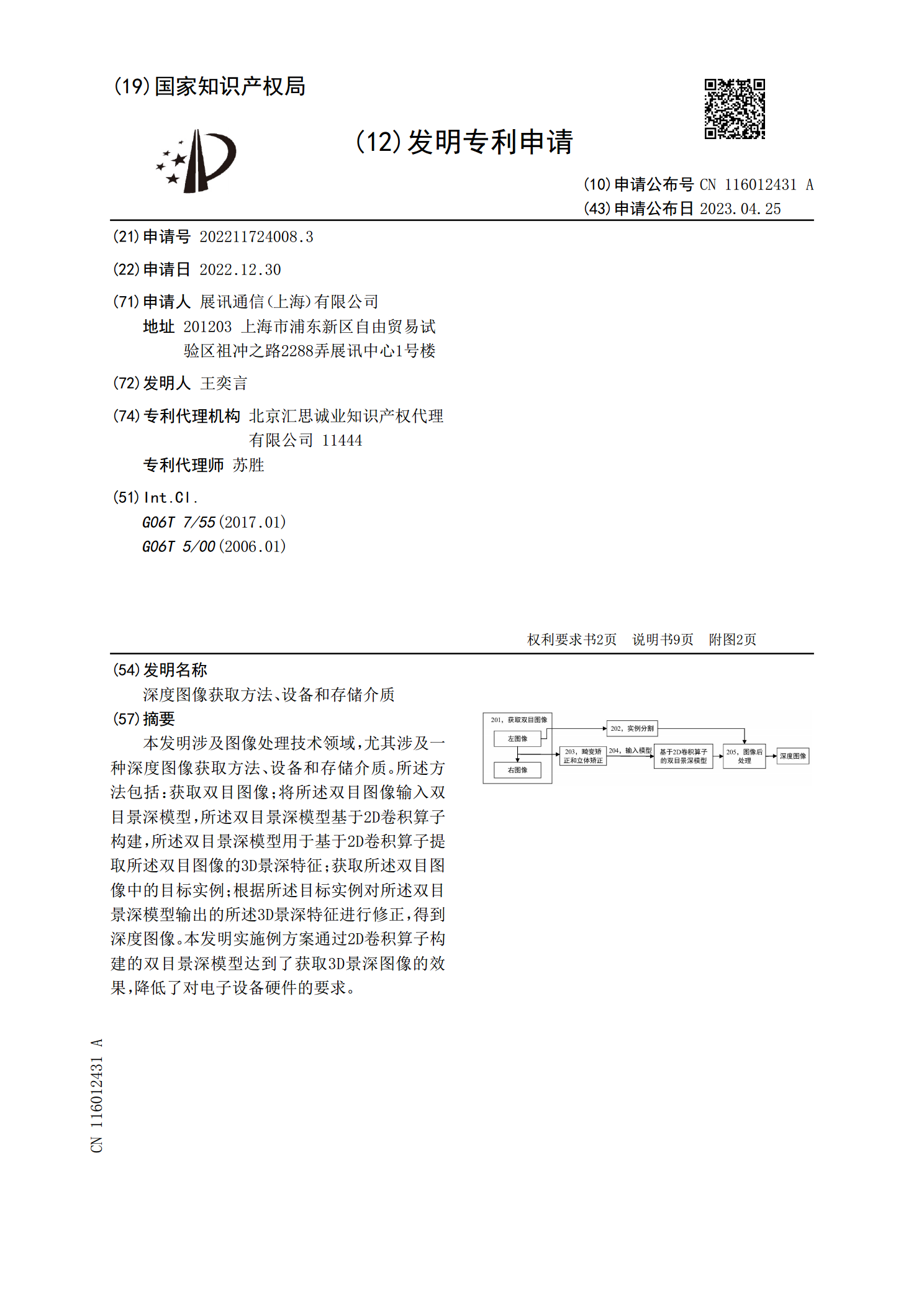
本发明涉及图像处理技术领域,尤其涉及一种深度图像获取方法、设备和存储介质。所述方法包括:获取双目图像;将所述双目图像输入双目景深模型,所述双目景深模型基于2D卷积算子构建,所述双目景深模型用于基于2D卷积算子提取所述双目图像的3D景深特征;获取所述双目图像中的目标实例;根据所述目标实例对所述双目景深模型输出的所述3D景深特征进行修正,得到深度图像。本发明实施例方案通过2D卷积算子构建的双目景深模型达到了获取3D景深图像的效果,降低了对电子设备硬件的要求。

图像获取方法、装置、设备和存储介质.pdf
本申请公开了一种图像获取方法、装置、设备和存储介质,属于图像处理技术领域。该图像获取方法包括:接收用户对视频播放界面的第一输入;响应于所述第一输入,获取包括第一原始视频图像的视频帧序列,所述第一原始视频图像为与第一预览视频图像关联的原始图像,所述第一预览视频图像是根据所述第一输入确定的;根据所述视频帧序列,得到目标图像,所述目标图像中第一区域的图像的分辨率大于所述第一预览视频图像中第二区域的图像的分辨率,所述第二区域为与所述第一区域对应位置的图像区域。
图像获取方法、图像获取装置、电子装置和存储介质.pdf
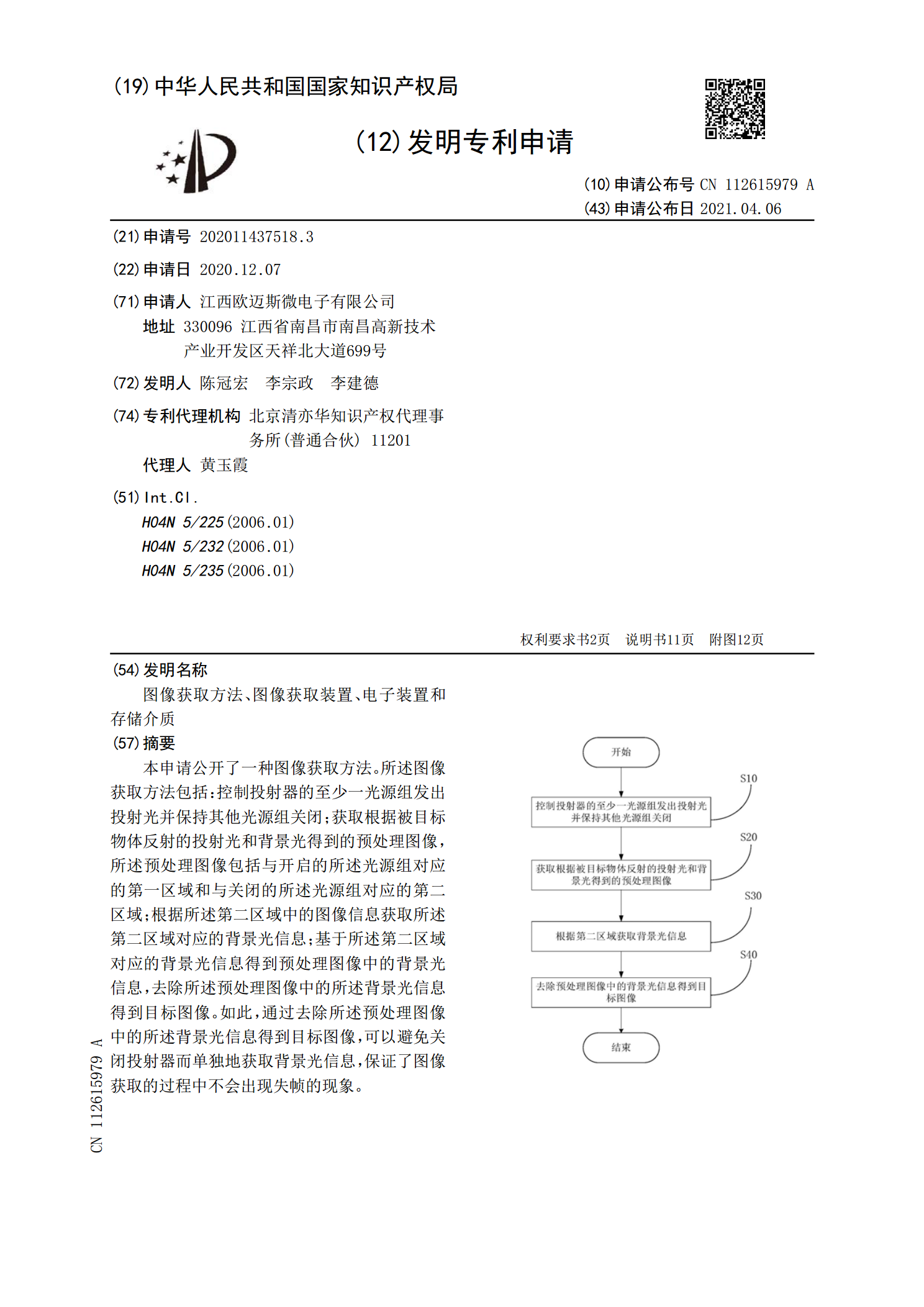
本申请公开了一种图像获取方法。所述图像获取方法包括:控制投射器的至少一光源组发出投射光并保持其他光源组关闭;获取根据被目标物体反射的投射光和背景光得到的预处理图像,所述预处理图像包括与开启的所述光源组对应的第一区域和与关闭的所述光源组对应的第二区域;根据所述第二区域中的图像信息获取所述第二区域对应的背景光信息;基于所述第二区域对应的背景光信息得到预处理图像中的背景光信息,去除所述预处理图像中的所述背景光信息得到目标图像。如此,通过去除所述预处理图像中的所述背景光信息得到目标图像,可以避免关闭投射器而单独地
图像获取方法、图像获取装置、电子设备及存储介质.pdf
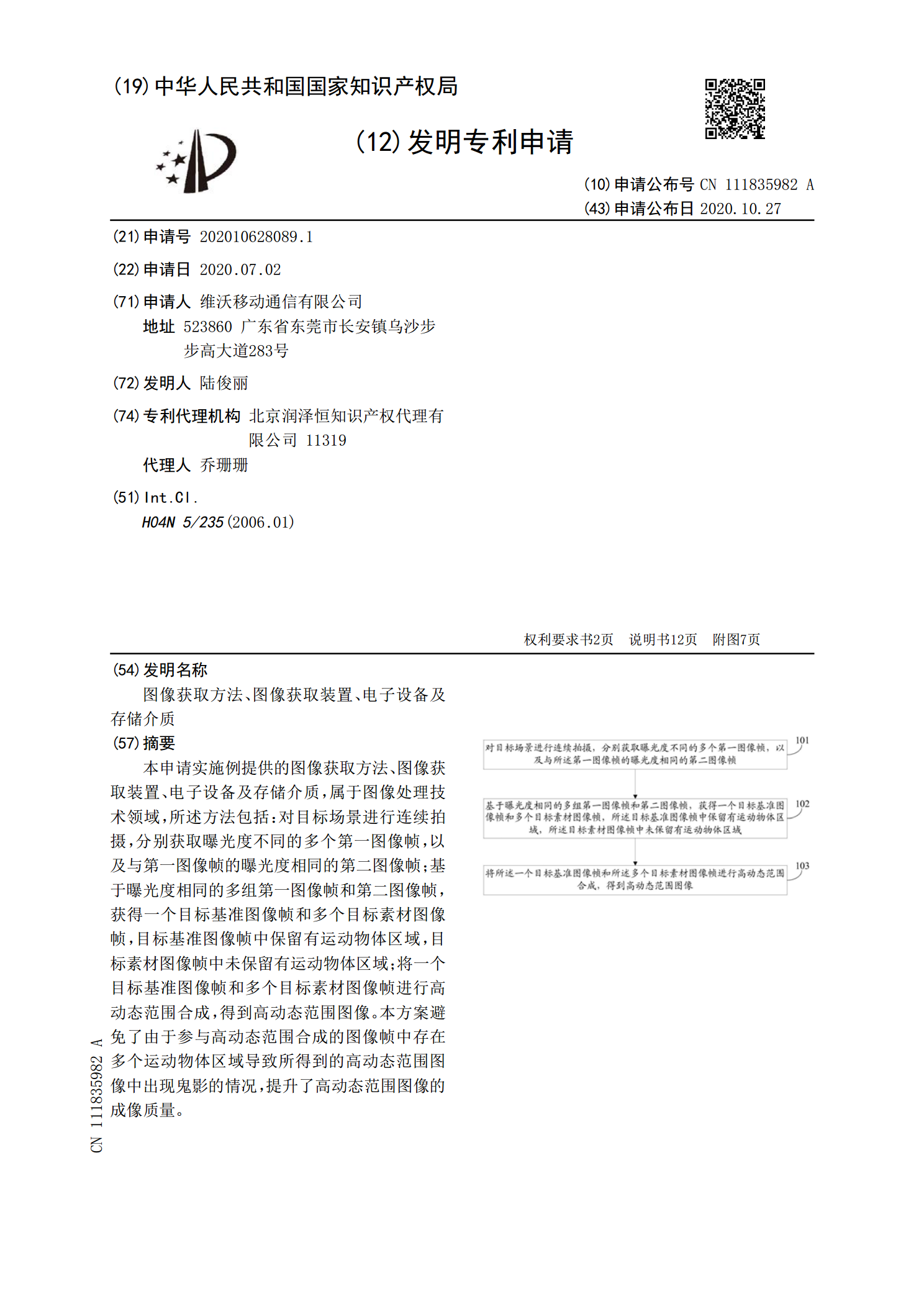
本申请实施例提供的图像获取方法、图像获取装置、电子设备及存储介质,属于图像处理技术领域,所述方法包括:对目标场景进行连续拍摄,分别获取曝光度不同的多个第一图像帧,以及与第一图像帧的曝光度相同的第二图像帧;基于曝光度相同的多组第一图像帧和第二图像帧,获得一个目标基准图像帧和多个目标素材图像帧,目标基准图像帧中保留有运动物体区域,目标素材图像帧中未保留有运动物体区域;将一个目标基准图像帧和多个目标素材图像帧进行高动态范围合成,得到高动态范围图像。本方案避免了由于参与高动态范围合成的图像帧中存在多个运动物体区域
注视深度获取方法和装置、显示设备、存储介质.pdf
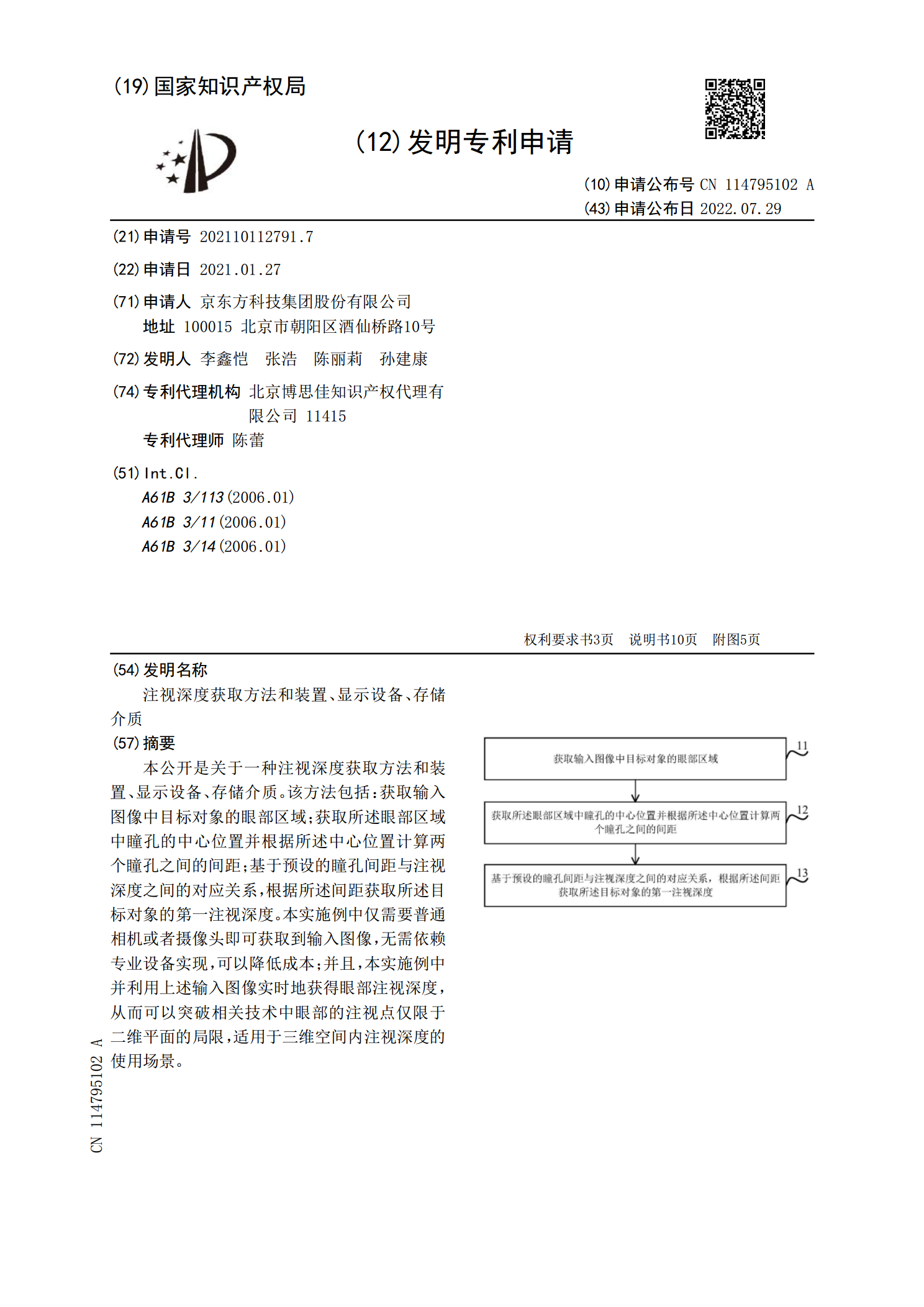
本公开是关于一种注视深度获取方法和装置、显示设备、存储介质。该方法包括:获取输入图像中目标对象的眼部区域;获取所述眼部区域中瞳孔的中心位置并根据所述中心位置计算两个瞳孔之间的间距;基于预设的瞳孔间距与注视深度之间的对应关系,根据所述间距获取所述目标对象的第一注视深度。本实施例中仅需要普通相机或者摄像头即可获取到输入图像,无需依赖专业设备实现,可以降低成本;并且,本实施例中并利用上述输入图像实时地获得眼部注视深度,从而可以突破相关技术中眼部的注视点仅限于二维平面的局限,适用于三维空间内注视深度的使用场景。