
一种内镜辅助用机械手.pdf

一吃****瀚文

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种内镜辅助用机械手.pdf
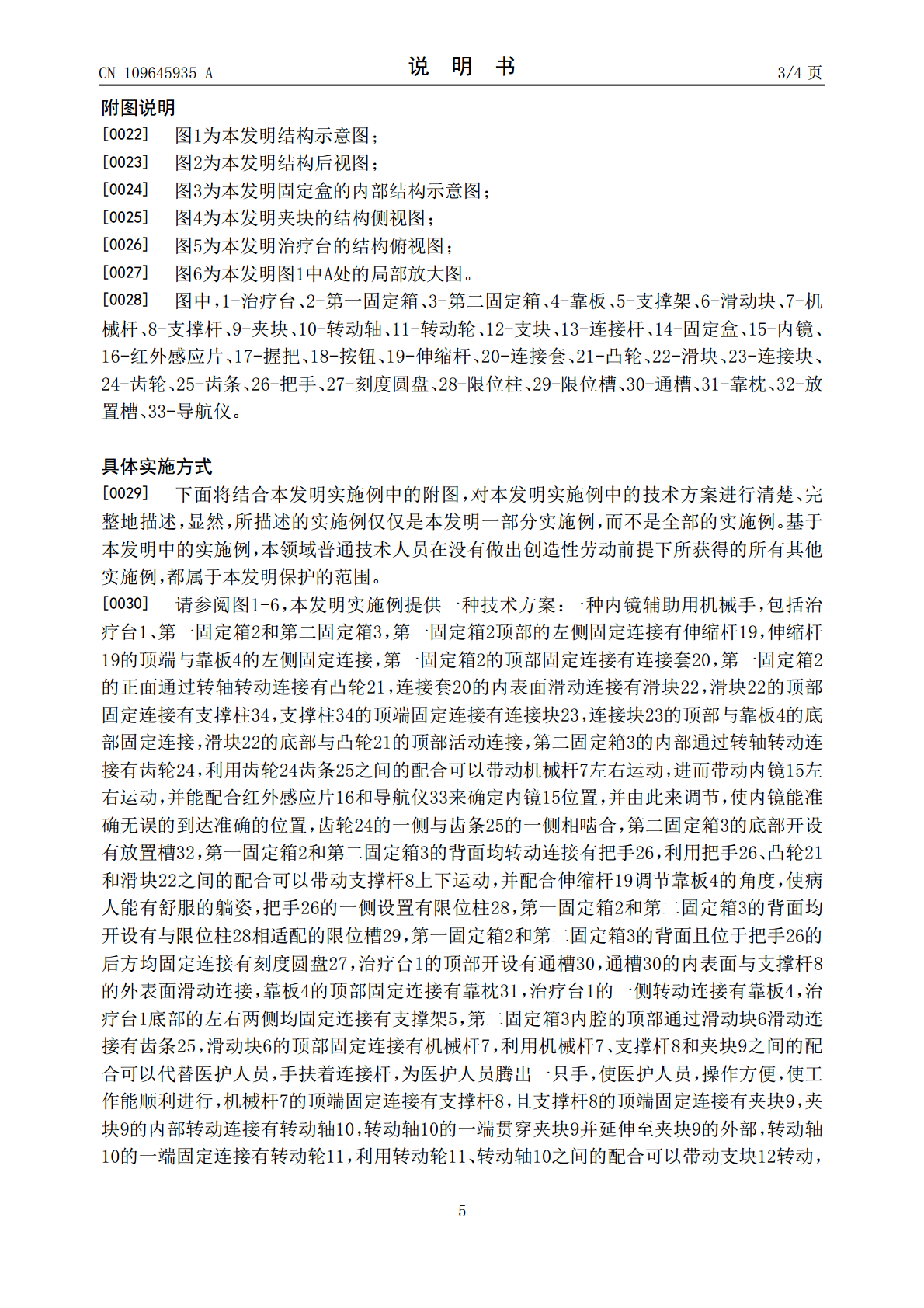
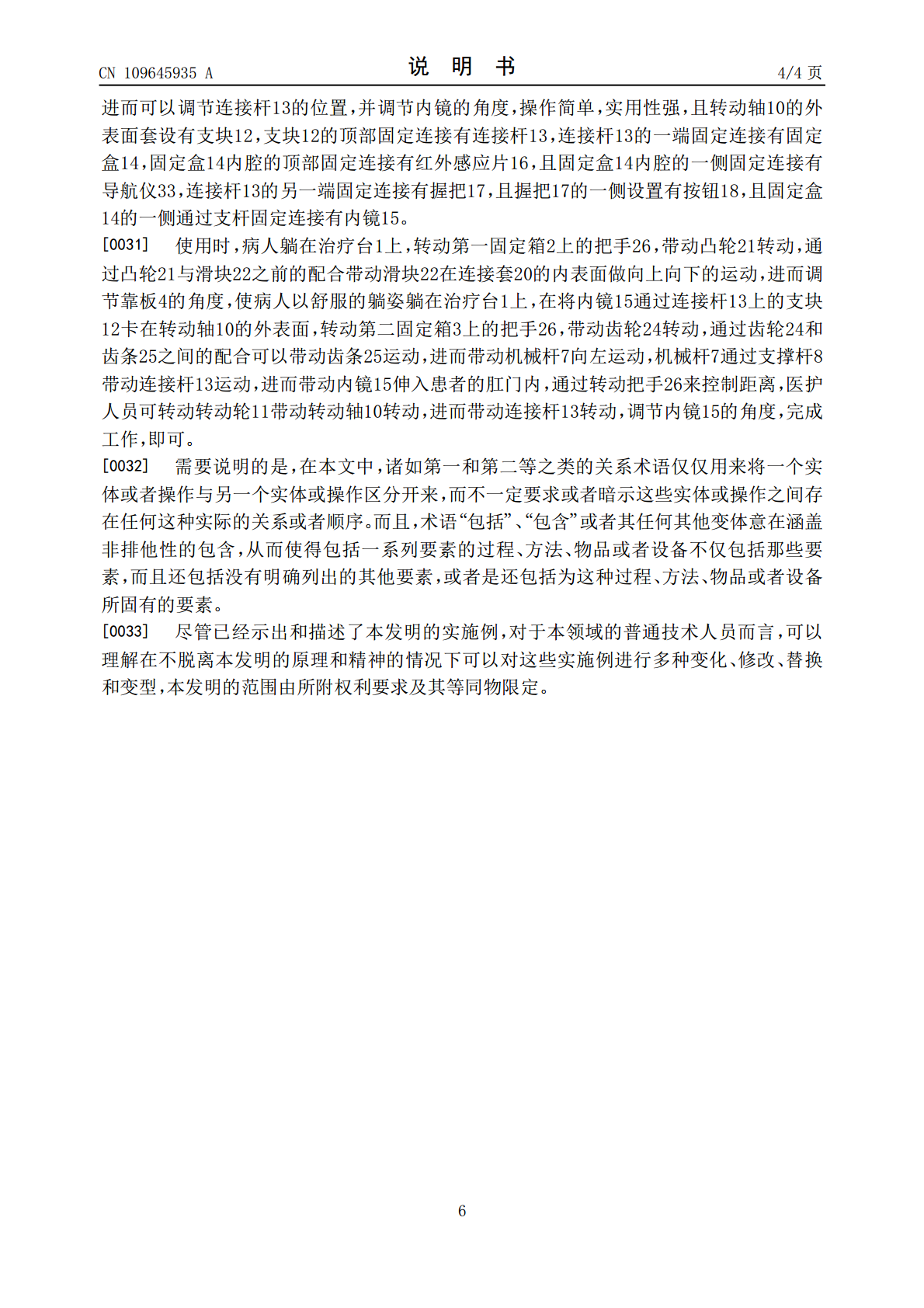
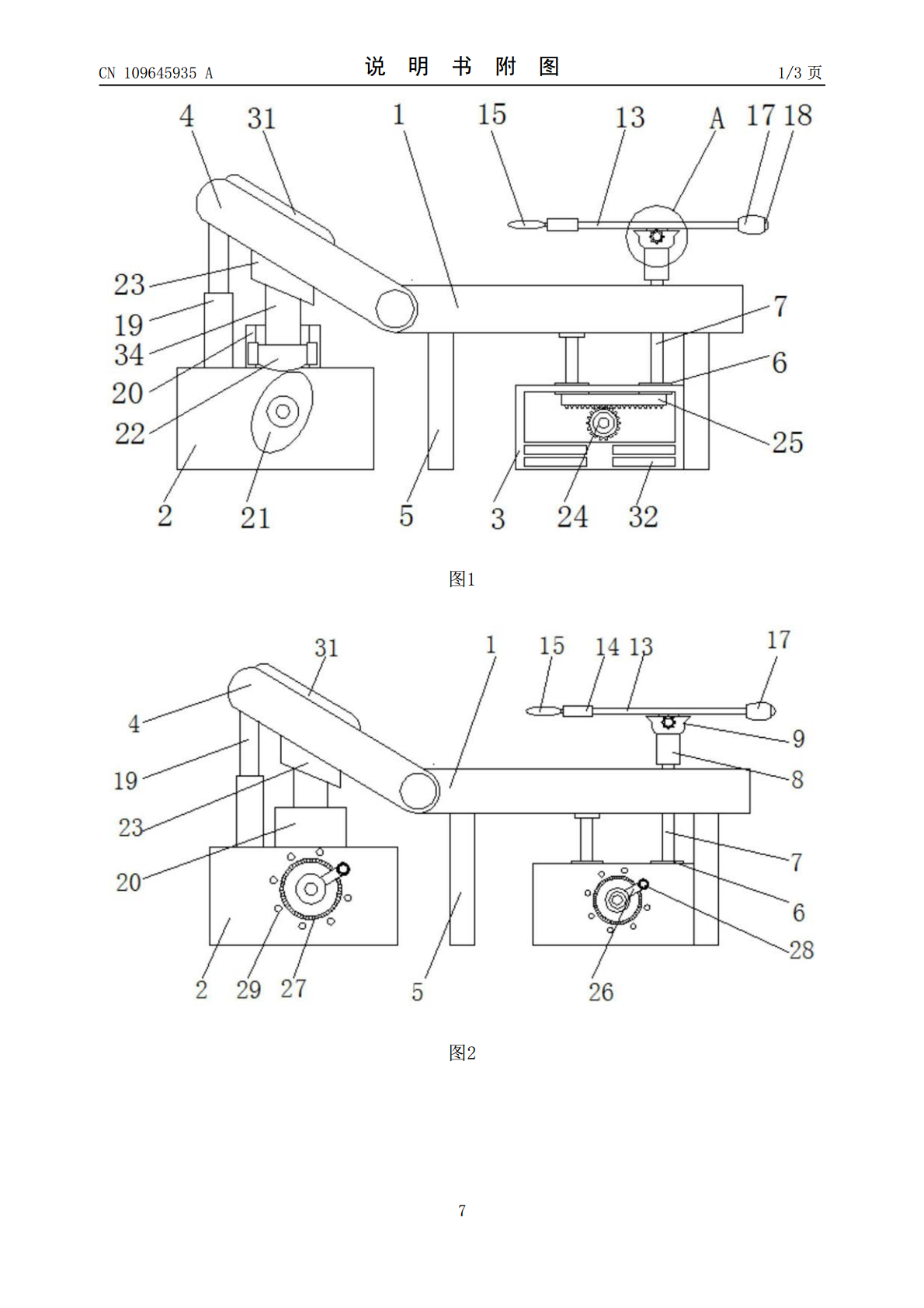
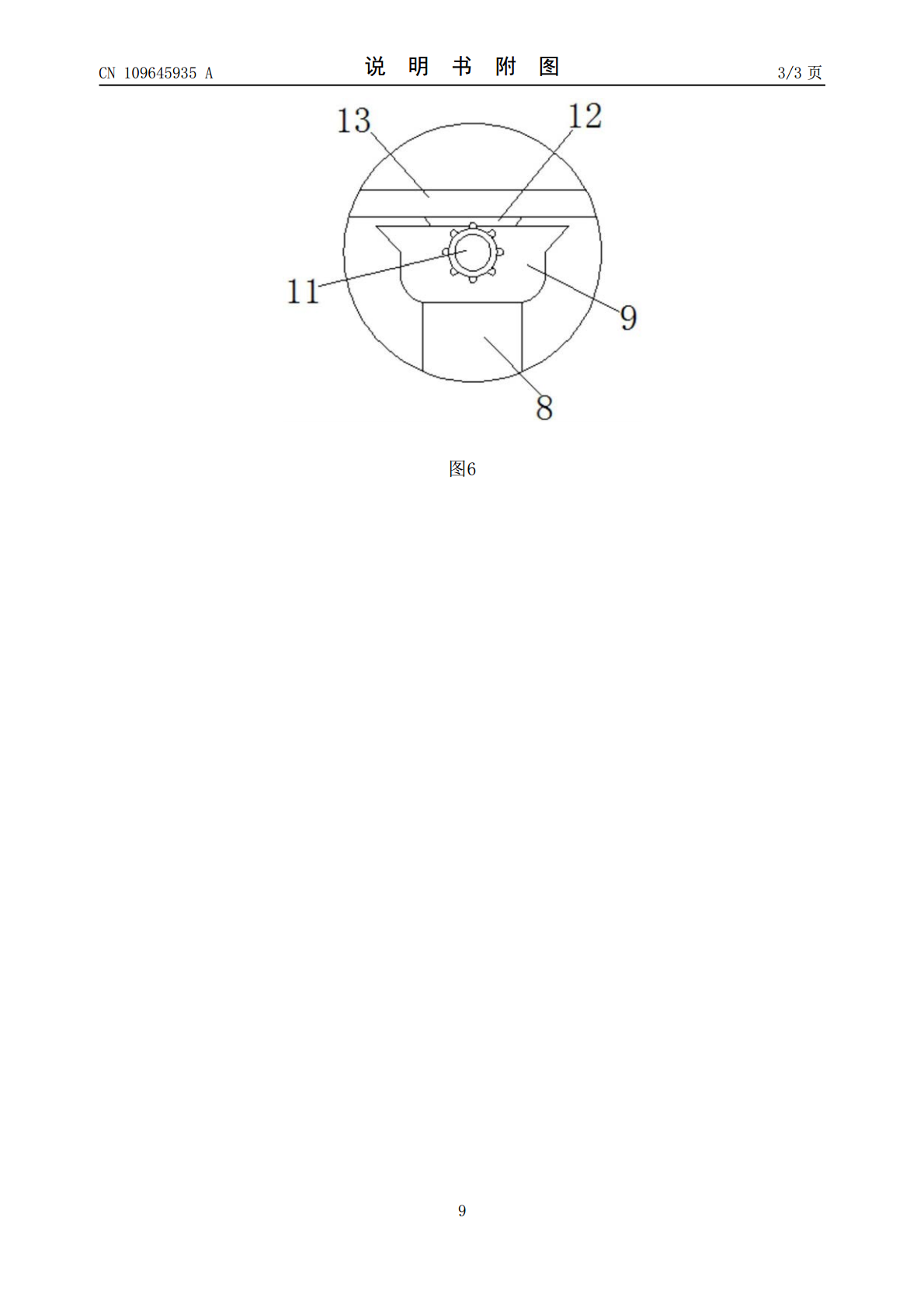
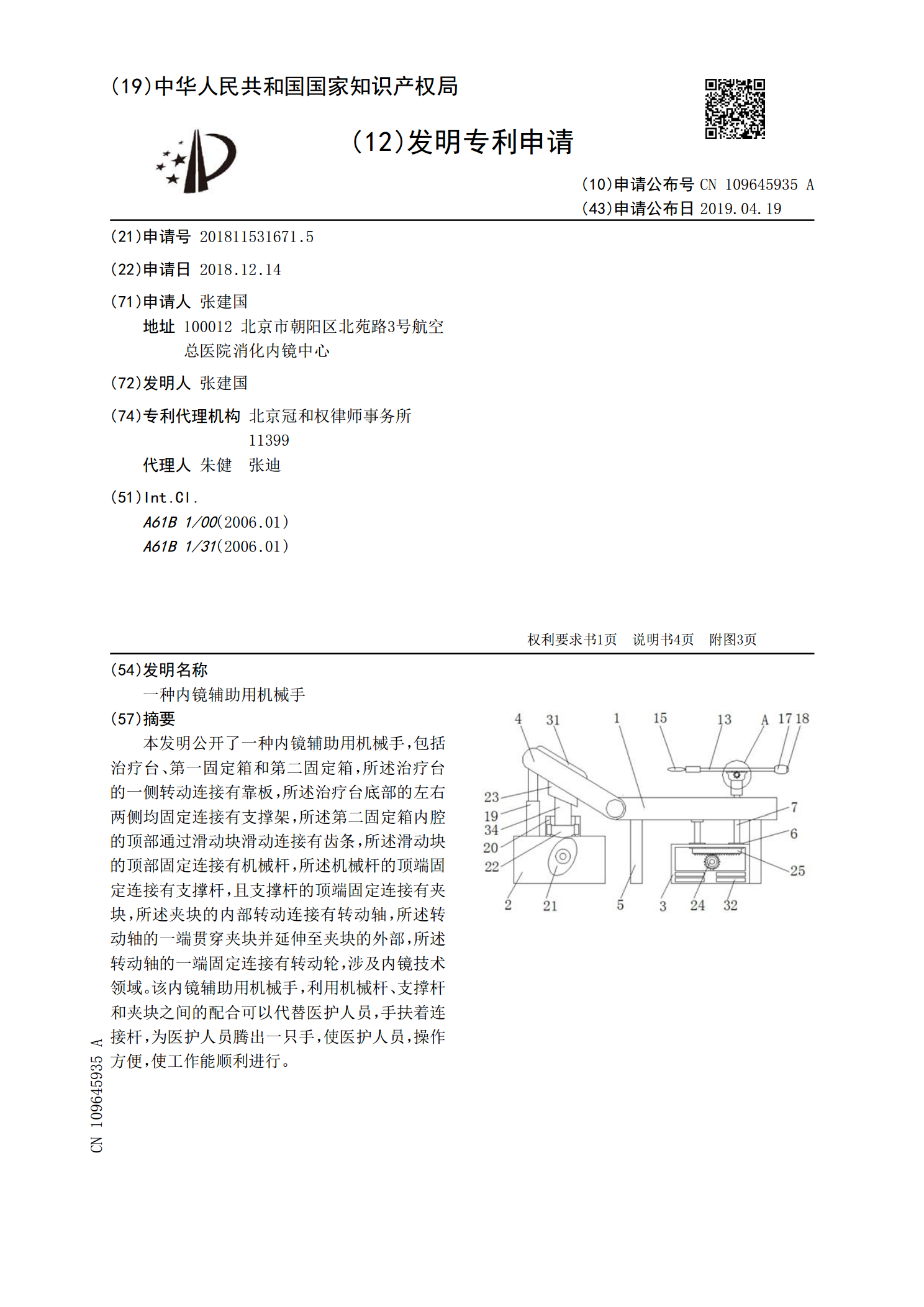
本发明公开了一种内镜辅助用机械手,包括治疗台、第一固定箱和第二固定箱,所述治疗台的一侧转动连接有靠板,所述治疗台底部的左右两侧均固定连接有支撑架,所述第二固定箱内腔的顶部通过滑动块滑动连接有齿条,所述滑动块的顶部固定连接有机械杆,所述机械杆的顶端固定连接有支撑杆,且支撑杆的顶端固定连接有夹块,所述夹块的内部转动连接有转动轴,所述转动轴的一端贯穿夹块并延伸至夹块的外部,所述转动轴的一端固定连接有转动轮,涉及内镜技术领域。该内镜辅助用机械手,利用机械杆、支撑杆和夹块之间的配合可以代替医护人员,手扶着连接杆,为
一种内镜手术用辅助带.pdf
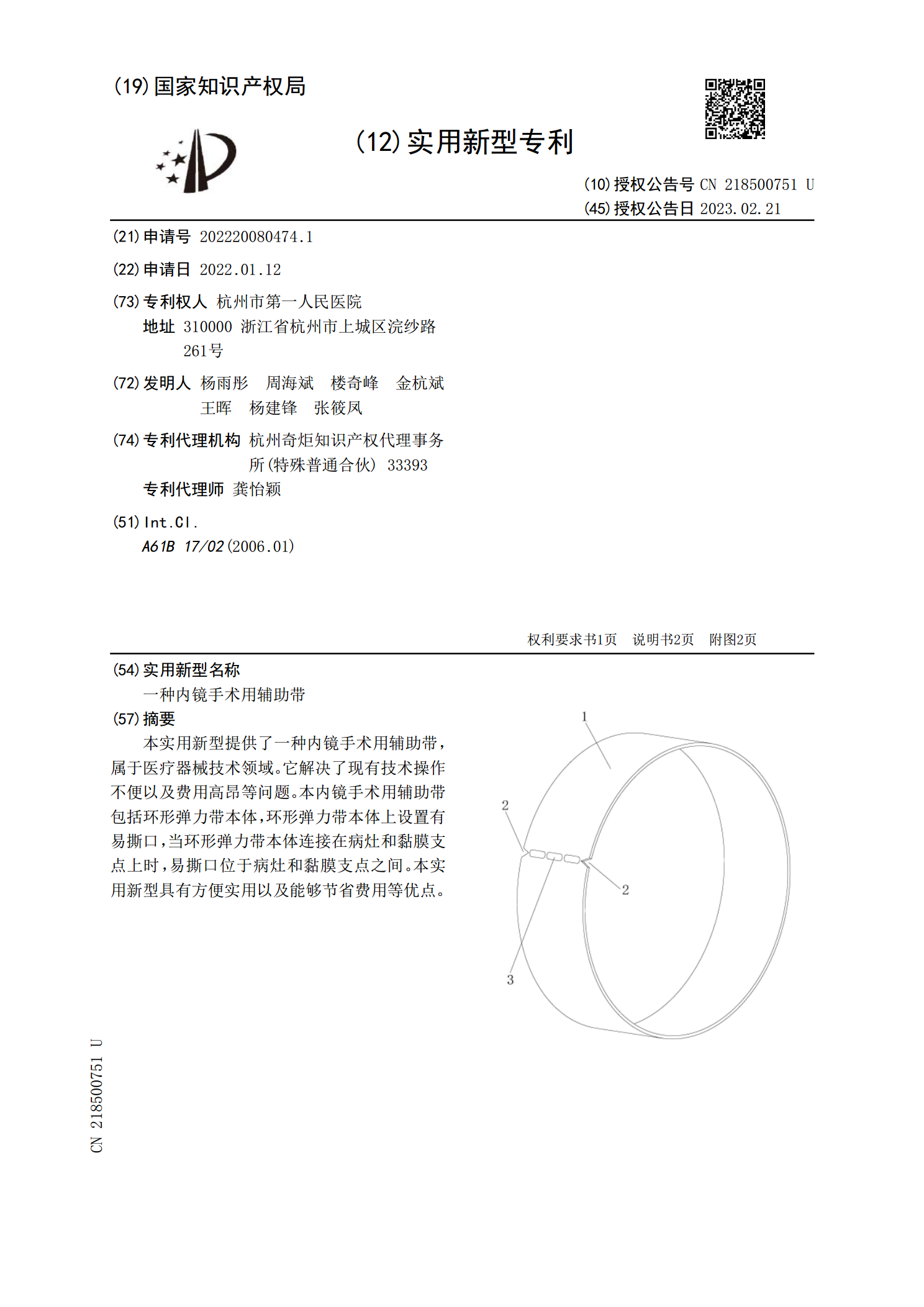
本实用新型提供了一种内镜手术用辅助带,属于医疗器械技术领域。它解决了现有技术操作不便以及费用高昂等问题。本内镜手术用辅助带包括环形弹力带本体,环形弹力带本体上设置有易撕口,当环形弹力带本体连接在病灶和黏膜支点上时,易撕口位于病灶和黏膜支点之间。本实用新型具有方便实用以及能够节省费用等优点。
一种内镜手术用辅助支撑装置.pdf
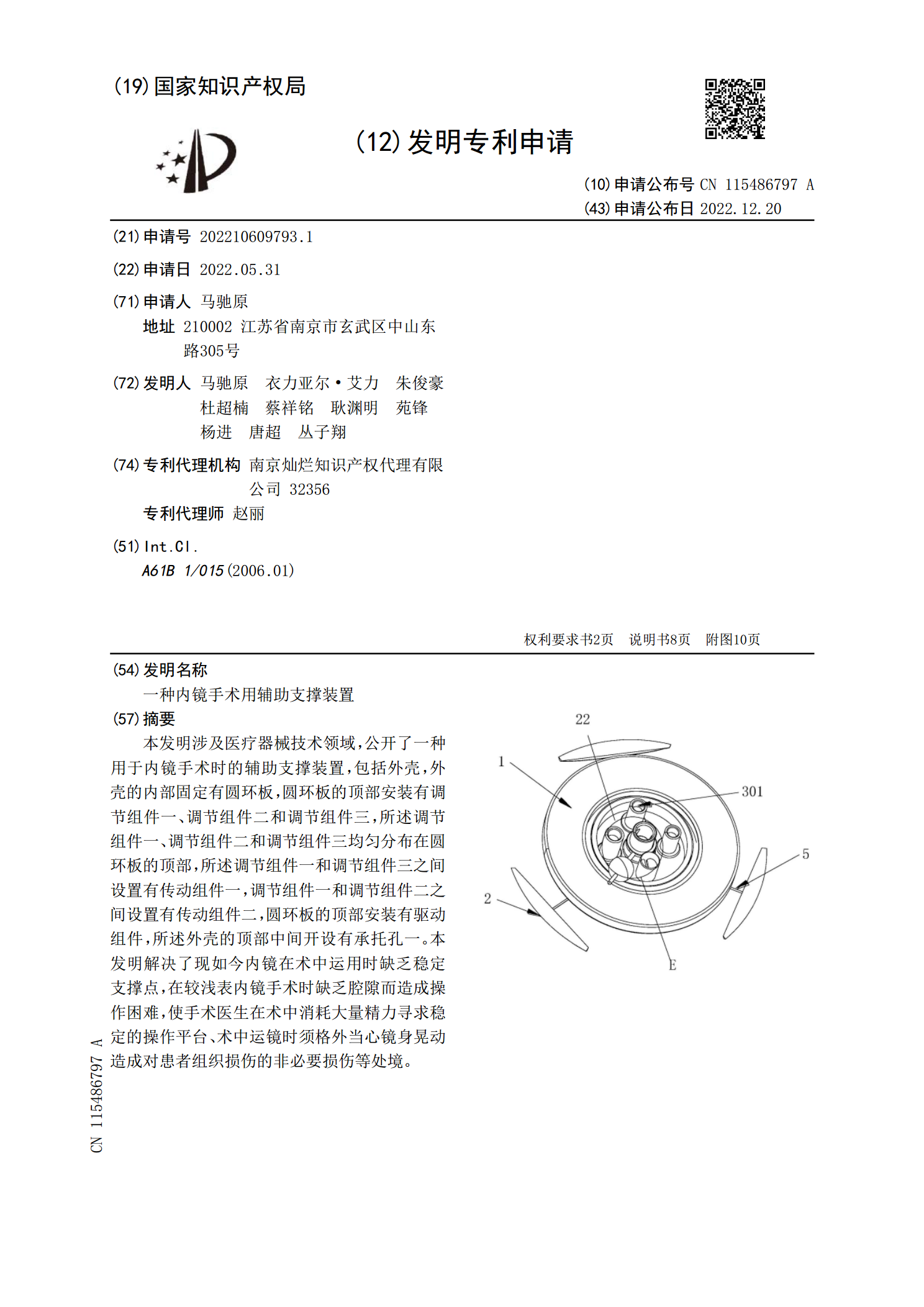
本发明涉及医疗器械技术领域,公开了一种用于内镜手术时的辅助支撑装置,包括外壳,外壳的内部固定有圆环板,圆环板的顶部安装有调节组件一、调节组件二和调节组件三,所述调节组件一、调节组件二和调节组件三均匀分布在圆环板的顶部,所述调节组件一和调节组件三之间设置有传动组件一,调节组件一和调节组件二之间设置有传动组件二,圆环板的顶部安装有驱动组件,所述外壳的顶部中间开设有承托孔一。本发明解决了现如今内镜在术中运用时缺乏稳定支撑点,在较浅表内镜手术时缺乏腔隙而造成操作困难,使手术医生在术中消耗大量精力寻求稳定的操作平台
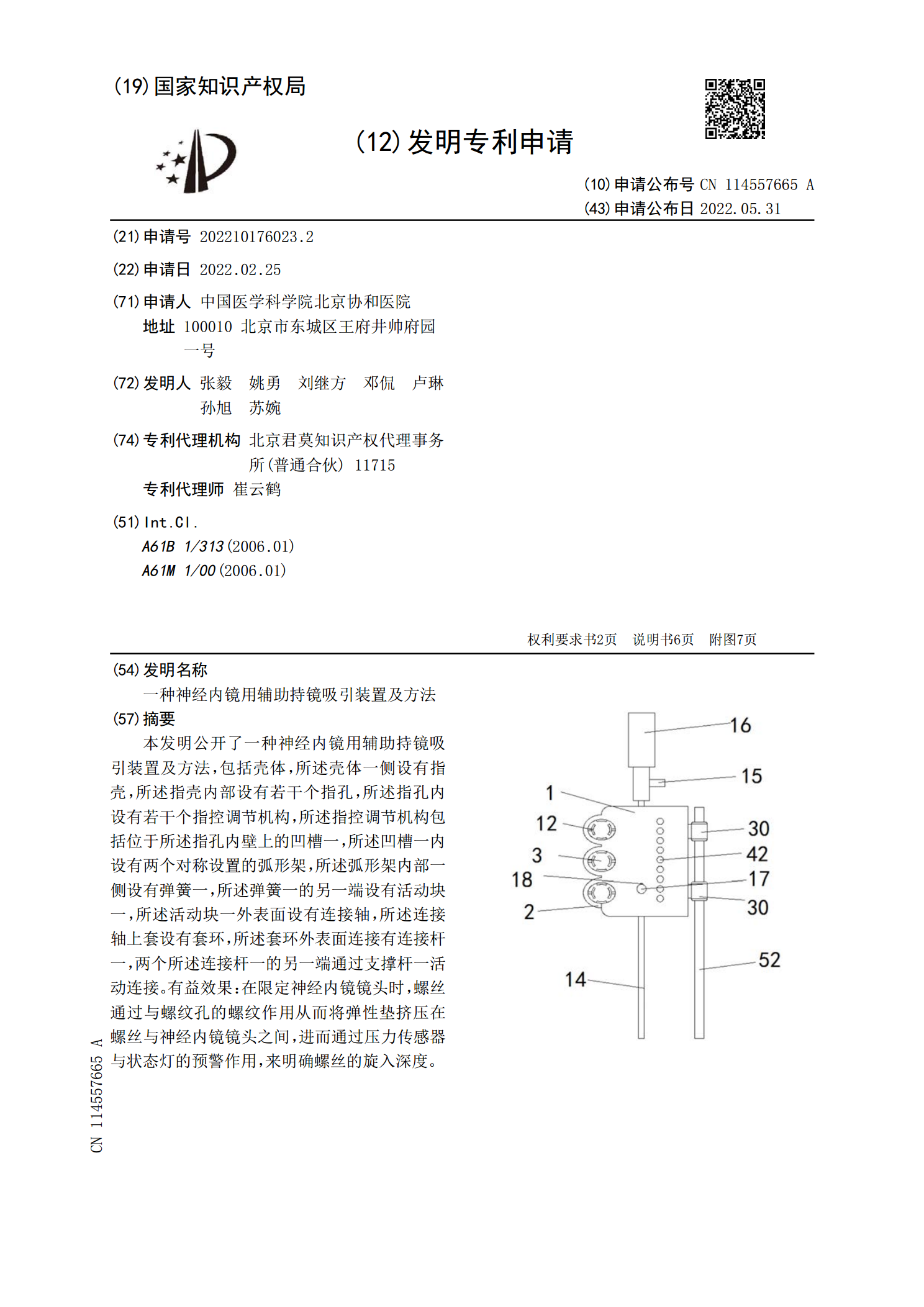
一种神经内镜用辅助持镜吸引装置及方法.pdf
本发明公开了一种神经内镜用辅助持镜吸引装置及方法,包括壳体,所述壳体一侧设有指壳,所述指壳内部设有若干个指孔,所述指孔内设有若干个指控调节机构,所述指控调节机构包括位于所述指孔内壁上的凹槽一,所述凹槽一内设有两个对称设置的弧形架,所述弧形架内部一侧设有弹簧一,所述弹簧一的另一端设有活动块一,所述活动块一外表面设有连接轴,所述连接轴上套设有套环,所述套环外表面连接有连接杆一,两个所述连接杆一的另一端通过支撑杆一活动连接。有益效果:在限定神经内镜镜头时,螺丝通过与螺纹孔的螺纹作用从而将弹性垫挤压在螺丝与神经内
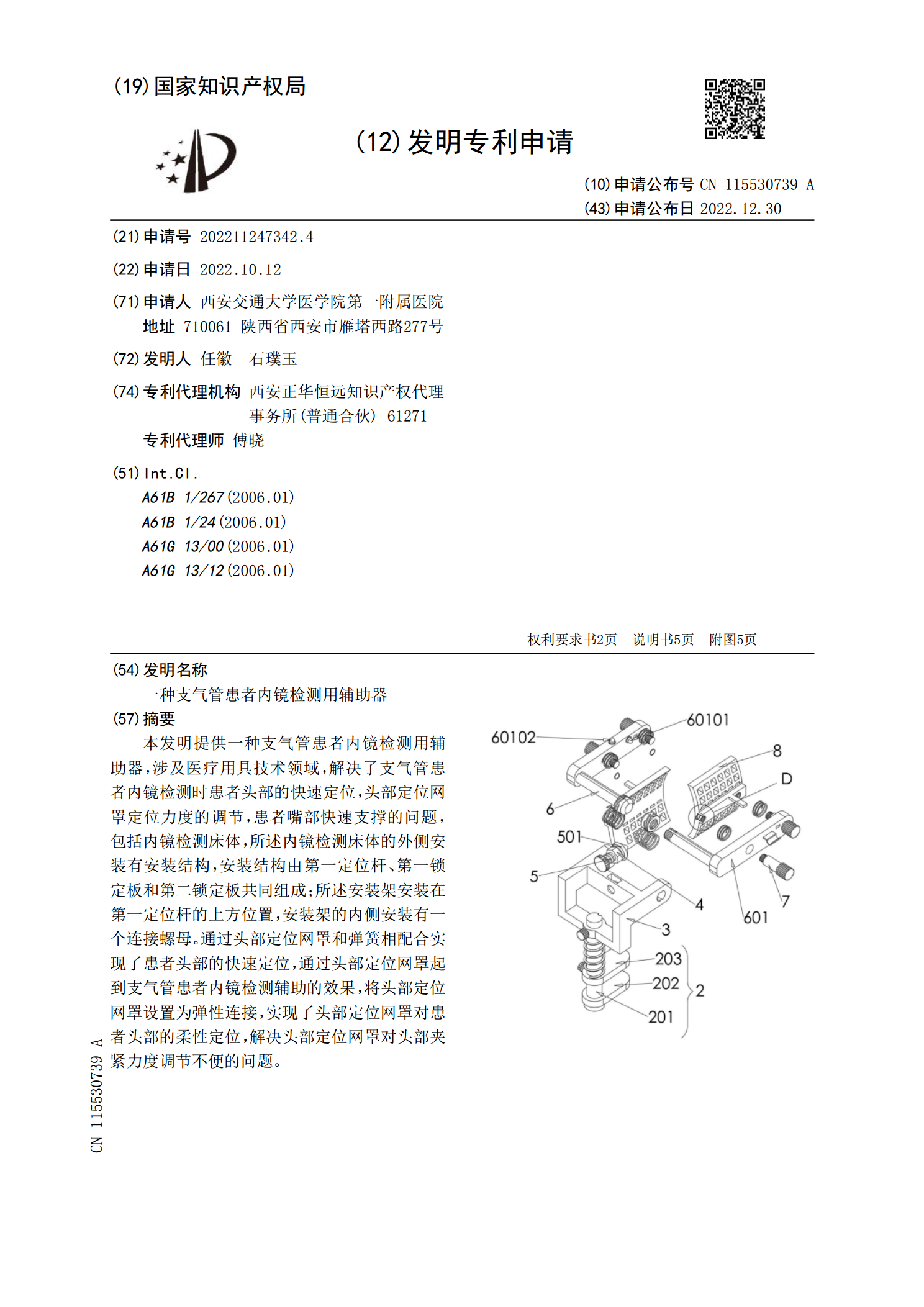
一种支气管患者内镜检测用辅助器.pdf
本发明提供一种支气管患者内镜检测用辅助器,涉及医疗用具技术领域,解决了支气管患者内镜检测时患者头部的快速定位,头部定位网罩定位力度的调节,患者嘴部快速支撑的问题,包括内镜检测床体,所述内镜检测床体的外侧安装有安装结构,安装结构由第一定位杆、第一锁定板和第二锁定板共同组成;所述安装架安装在第一定位杆的上方位置,安装架的内侧安装有一个连接螺母。通过头部定位网罩和弹簧相配合实现了患者头部的快速定位,通过头部定位网罩起到支气管患者内镜检测辅助的效果,将头部定位网罩设置为弹性连接,实现了头部定位网罩对患者头部的柔性