
一种双目线激光3D相机的外参标定方法.pdf

是你****元呀

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双目线激光3D相机的外参标定方法.pdf
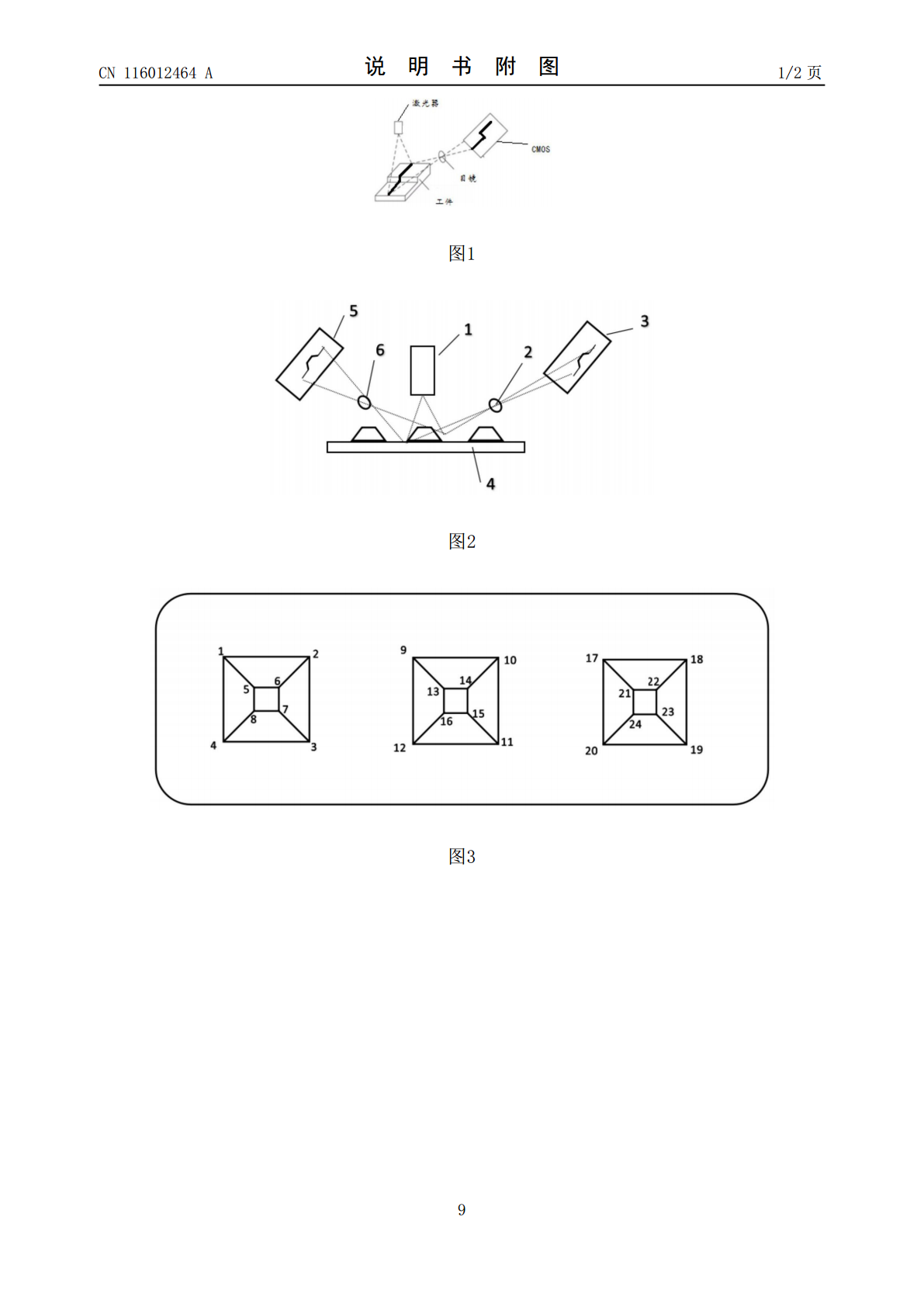
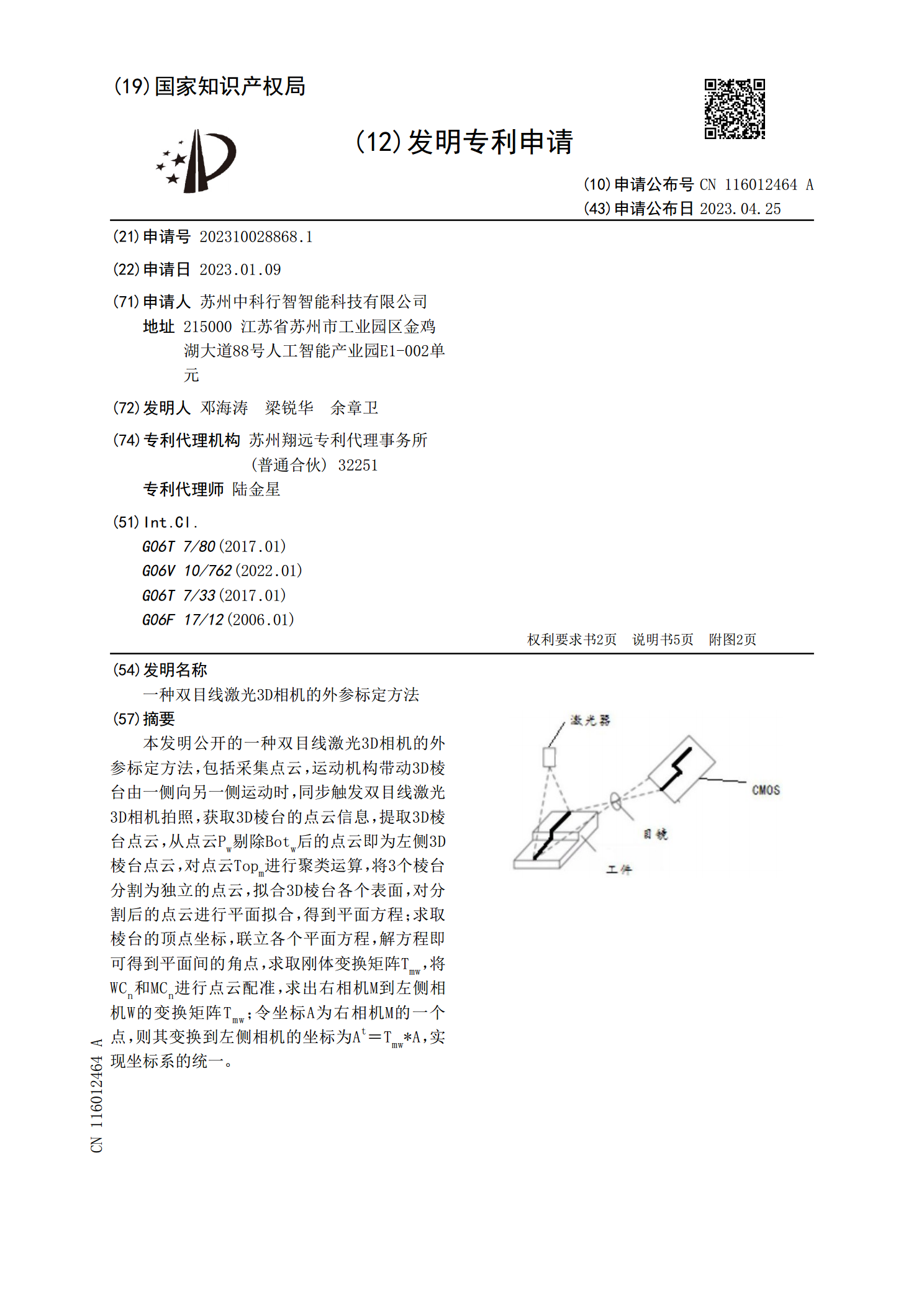
本发明公开的一种双目线激光3D相机的外参标定方法,包括采集点云,运动机构带动3D棱台由一侧向另一侧运动时,同步触发双目线激光3D相机拍照,获取3D棱台的点云信息,提取3D棱台点云,从点云P

双目相机外参标定方法和装置.pdf
本说明书涉及自动驾驶技术领域,具体地公开了一种双目相机外参标定方法和装置,其中,该方法包括:获取多帧第一图像和多帧第二图像,第一图像为车辆在沿平坦直线车道行驶时左目摄像头拍摄到的多帧图像,第二图像为车辆在沿平坦直线车道行驶时右目摄像头拍摄的多帧图像;提取多帧第一图像中各帧第一图像中的多个第一静态特征,提取多帧第二图像中各帧第二图像中的多个第二静态特征;将多个第一静态特征与多个第二静态特征进行匹配,得到多个静态特征对;根据历史校准文件、左目摄像头与右目摄像头之间的距离以及多个静态特征对,确定左目摄像头与右目
激光雷达与相机联合外参标定系统及方法.pdf
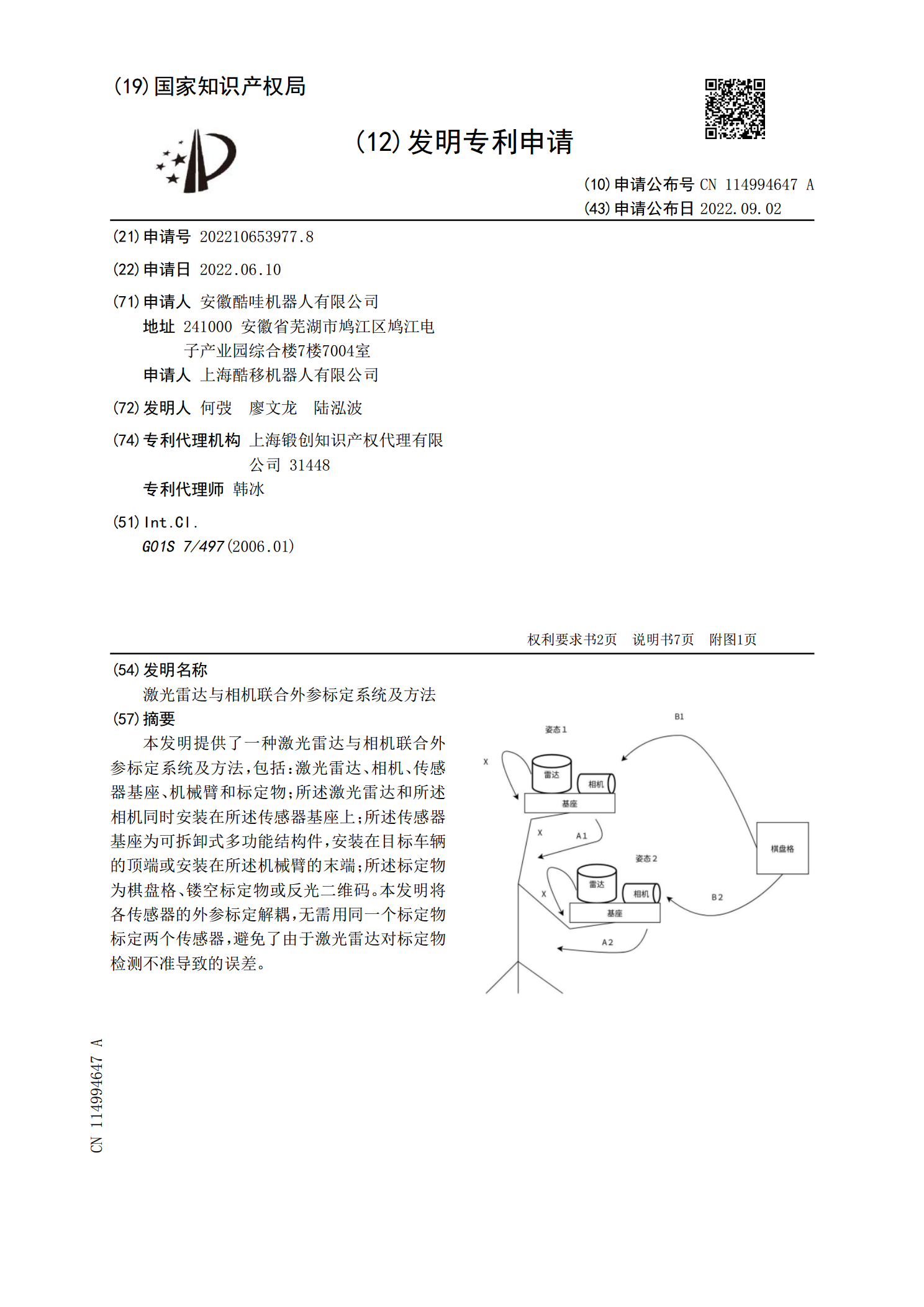
本发明提供了一种激光雷达与相机联合外参标定系统及方法,包括:激光雷达、相机、传感器基座、机械臂和标定物;所述激光雷达和所述相机同时安装在所述传感器基座上;所述传感器基座为可拆卸式多功能结构件,安装在目标车辆的顶端或安装在所述机械臂的末端;所述标定物为棋盘格、镂空标定物或反光二维码。本发明将各传感器的外参标定解耦,无需用同一个标定物标定两个传感器,避免了由于激光雷达对标定物检测不准导致的误差。
一种激光雷达与视觉相机的外参标定装置及标定方法.pdf
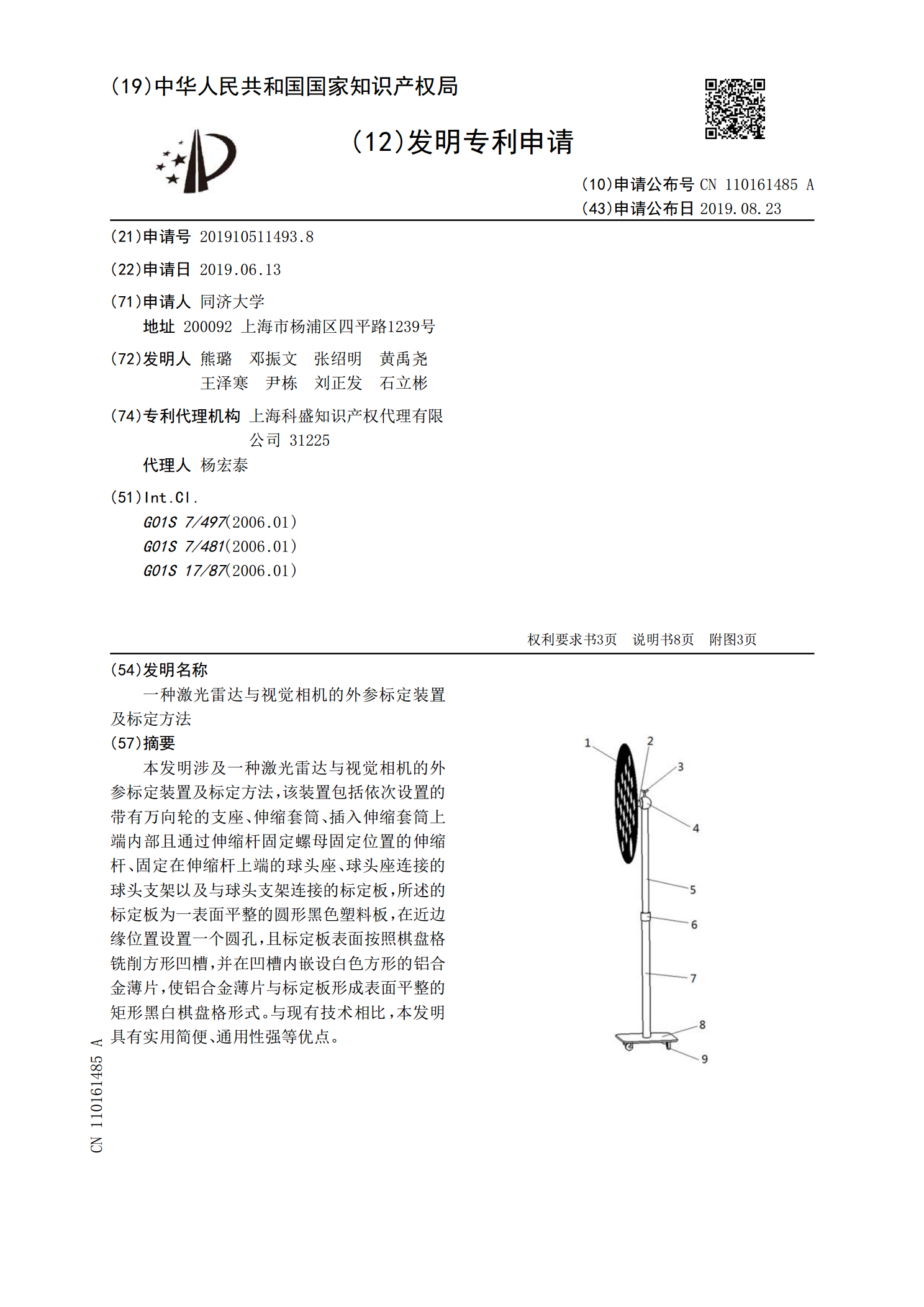
本发明涉及一种激光雷达与视觉相机的外参标定装置及标定方法,该装置包括依次设置的带有万向轮的支座、伸缩套筒、插入伸缩套筒上端内部且通过伸缩杆固定螺母固定位置的伸缩杆、固定在伸缩杆上端的球头座、球头座连接的球头支架以及与球头支架连接的标定板,所述的标定板为一表面平整的圆形黑色塑料板,在近边缘位置设置一个圆孔,且标定板表面按照棋盘格铣削方形凹槽,并在凹槽内嵌设白色方形的铝合金薄片,使铝合金薄片与标定板形成表面平整的矩形黑白棋盘格形式。与现有技术相比,本发明具有实用简便、通用性强等优点。
相机和激光雷达的外参标定方法、系统及可读存储介质.pdf
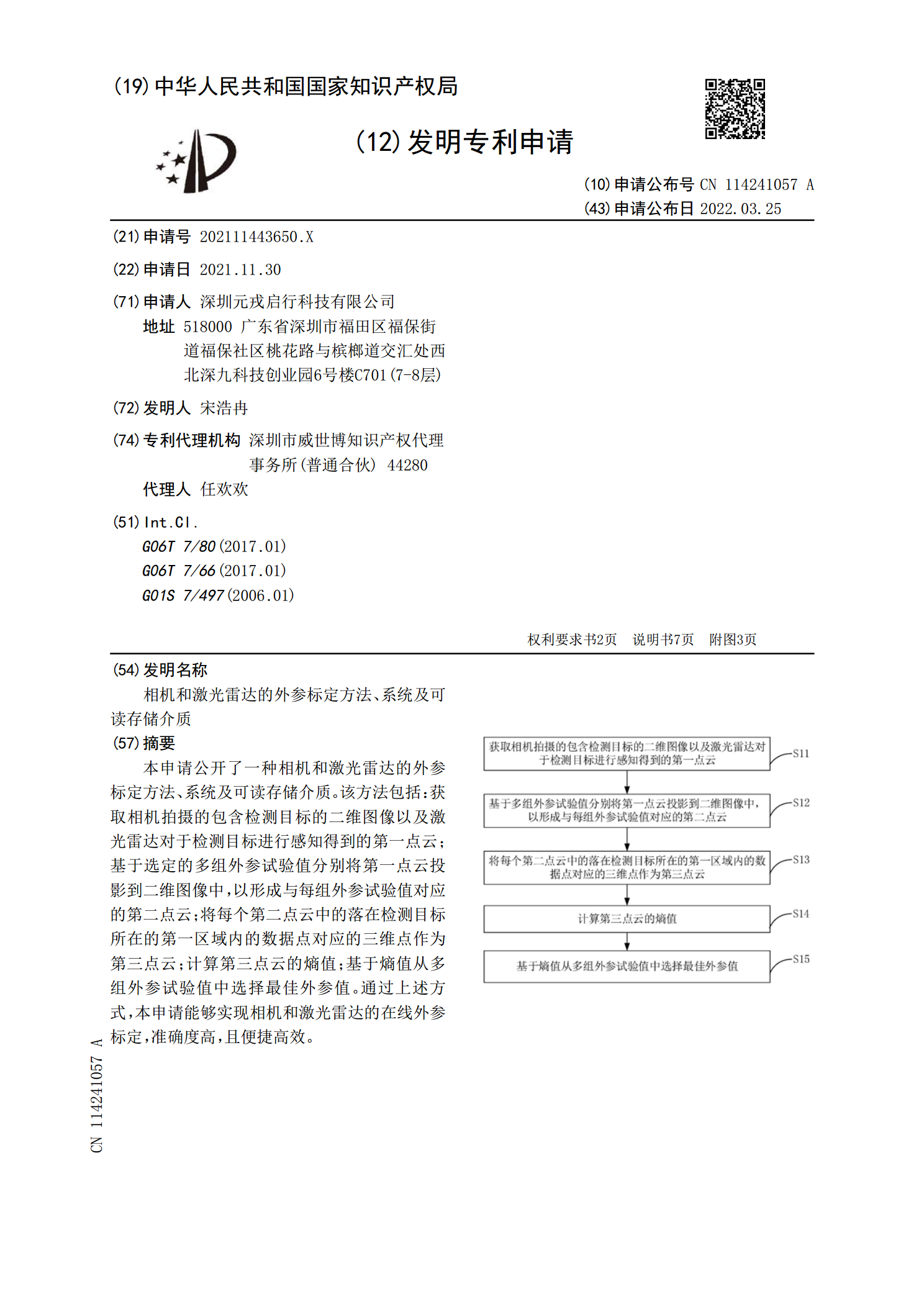
本申请公开了一种相机和激光雷达的外参标定方法、系统及可读存储介质。该方法包括:获取相机拍摄的包含检测目标的二维图像以及激光雷达对于检测目标进行感知得到的第一点云;基于选定的多组外参试验值分别将第一点云投影到二维图像中,以形成与每组外参试验值对应的第二点云;将每个第二点云中的落在检测目标所在的第一区域内的数据点对应的三维点作为第三点云;计算第三点云的熵值;基于熵值从多组外参试验值中选择最佳外参值。通过上述方式,本申请能够实现相机和激光雷达的在线外参标定,准确度高,且便捷高效。