
基于相位特征与边缘特征的红外与可见光图像配准方法.pdf

映雁****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于相位特征与边缘特征的红外与可见光图像配准方法.pdf
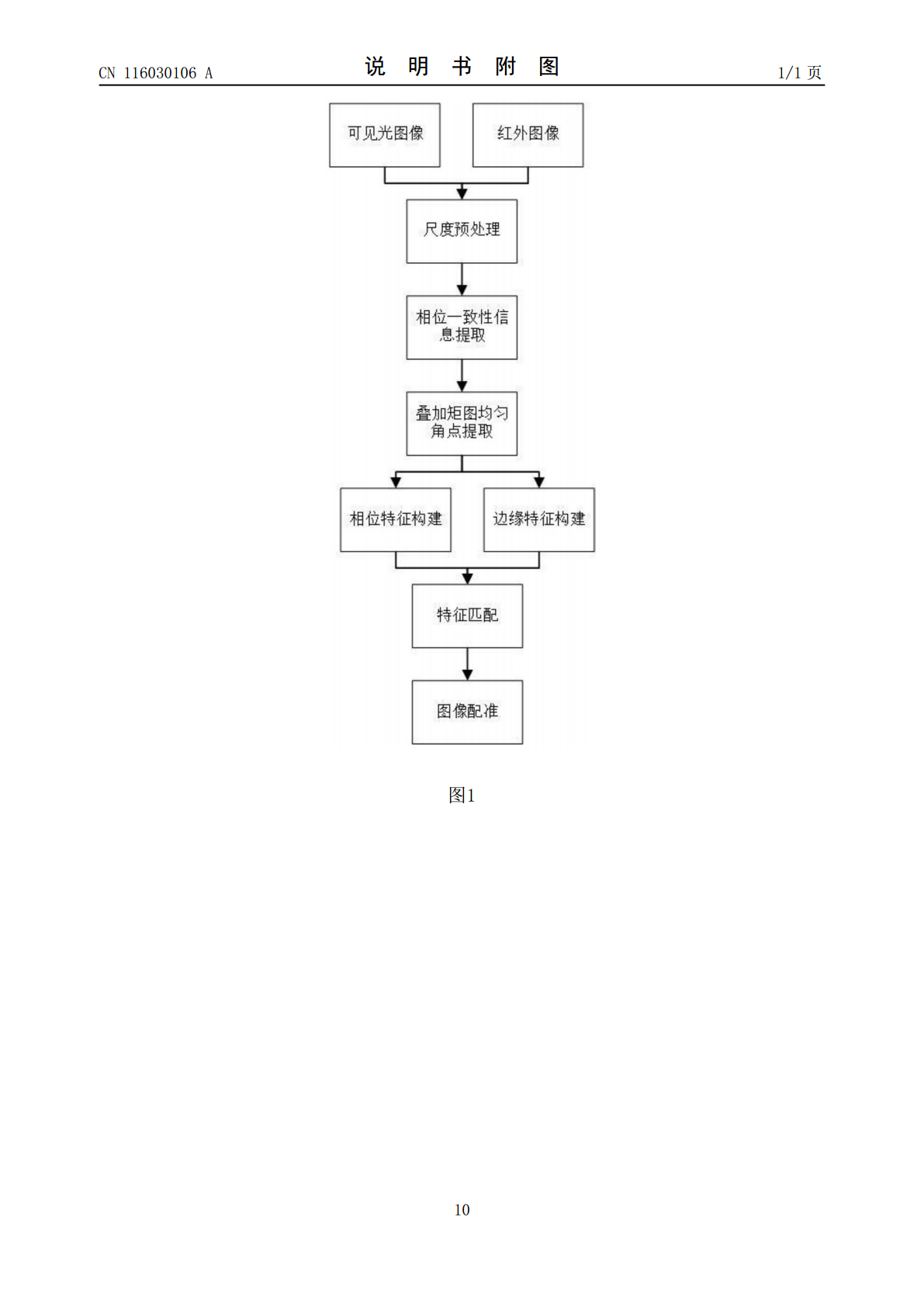
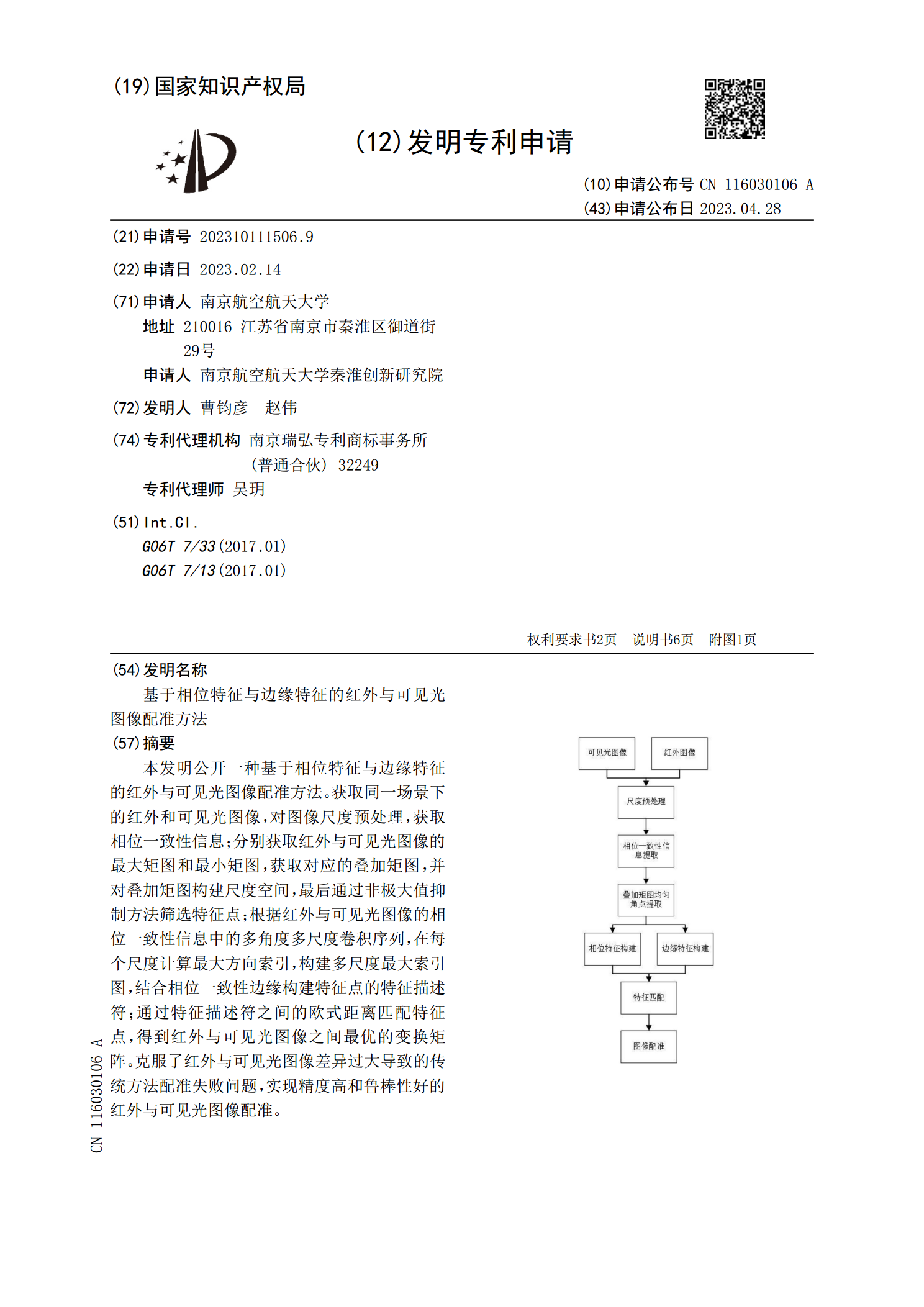
本发明公开一种基于相位特征与边缘特征的红外与可见光图像配准方法。获取同一场景下的红外和可见光图像,对图像尺度预处理,获取相位一致性信息;分别获取红外与可见光图像的最大矩图和最小矩图,获取对应的叠加矩图,并对叠加矩图构建尺度空间,最后通过非极大值抑制方法筛选特征点;根据红外与可见光图像的相位一致性信息中的多角度多尺度卷积序列,在每个尺度计算最大方向索引,构建多尺度最大索引图,结合相位一致性边缘构建特征点的特征描述符;通过特征描述符之间的欧式距离匹配特征点,得到红外与可见光图像之间最优的变换矩阵。克服了红外与

基于特征的红外与可见光图像配准方法研究的任务书.docx
基于特征的红外与可见光图像配准方法研究的任务书一、选题依据红外和可见光图像在不同的应用场景中都具有重要的作用。然而,这两种图像的光谱特性和成像原理不同,导致其具有不同的特点,因此要对红外和可见光图像进行配准,以充分发挥它们在各自应用领域的优势。对于可见光图像而言,由于人眼对色彩的敏感度很高,因此可见光图像可直观地展示物体的颜色、形状、纹理等特征。而红外图像往往可以在不同的光照条件下获取清晰的成像结果,对于一些难以用可见光图像进行观察的物体如建筑物、机器设备等的监测,以及对于一些天然灾害、环境污染的监测等领

一种基于多尺度特征的热红外图像配准方法.pdf
本发明涉及一种基于多尺度特征的热红外图像配准方法,实现步骤如下:(1)以多光谱图像为参考图像,热红外图像作为待配准图像,对参考图像和待配准图像分别进行小波分解,分解后图像的分辨率与未分解前的多光谱图像和热红外图像相同;(2)计算步骤(1)中分解后图像中所有分解层的直方图,只有灰度值属于前5%的多光谱图像和热红外图像特征点才被保留,这些特征点代表了配准过程中要使用的点;(3)对步骤(2)中的特征点进行相关计算,寻找匹配点,从而完成热红外图像。本发明将图像分解成不同尺度、不同方向的图像系列,具有特征可选的优点
一种基于变换矩阵优化特征匹配的红外图像配准方法.pdf
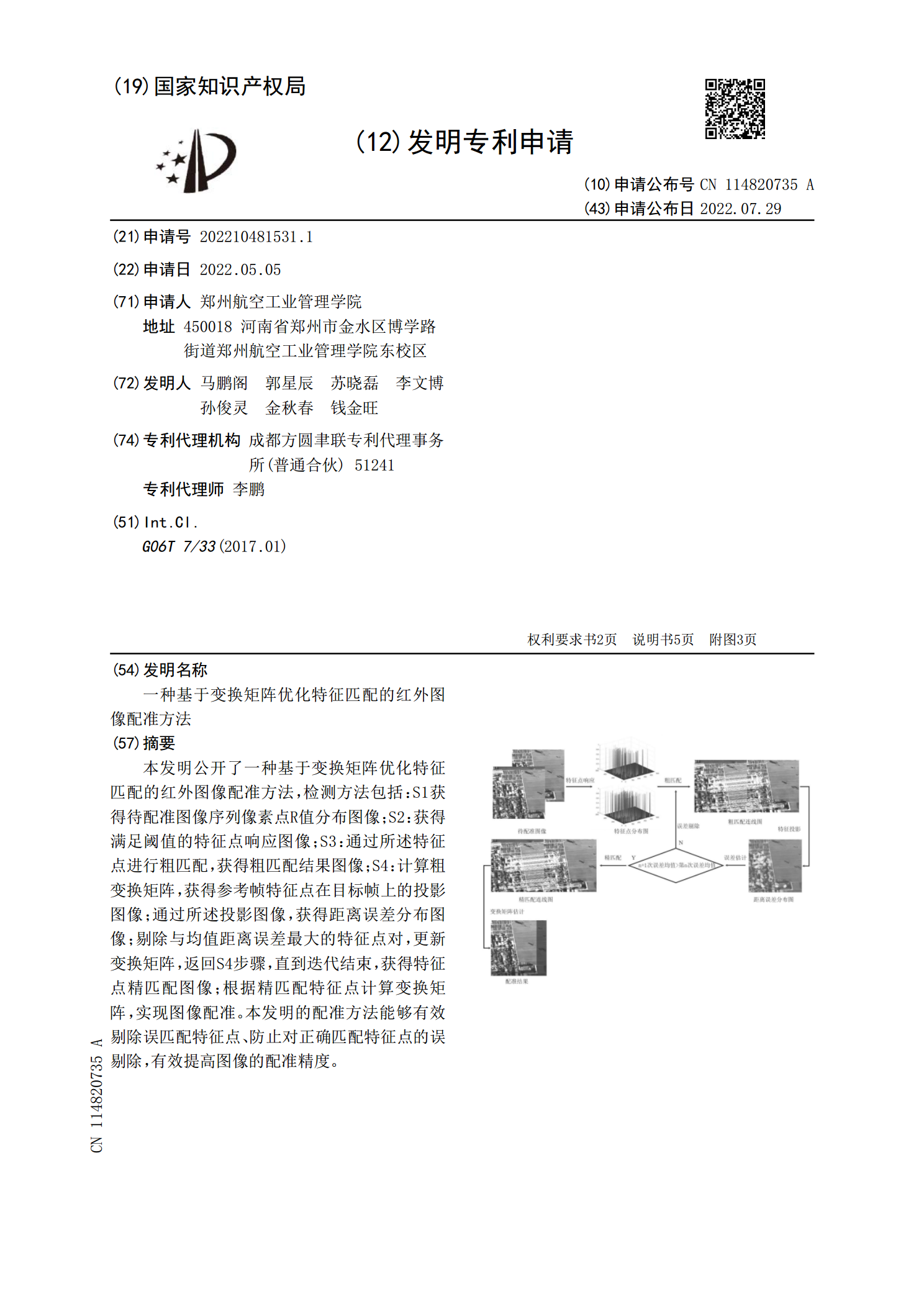
本发明公开了一种基于变换矩阵优化特征匹配的红外图像配准方法,检测方法包括:S1获得待配准图像序列像素点R值分布图像;S2:获得满足阈值的特征点响应图像;S3:通过所述特征点进行粗匹配,获得粗匹配结果图像;S4:计算粗变换矩阵,获得参考帧特征点在目标帧上的投影图像;通过所述投影图像,获得距离误差分布图像;剔除与均值距离误差最大的特征点对,更新变换矩阵,返回S4步骤,直到迭代结束,获得特征点精匹配图像;根据精匹配特征点计算变换矩阵,实现图像配准。本发明的配准方法能够有效剔除误匹配特征点、防止对正确匹配特征点的
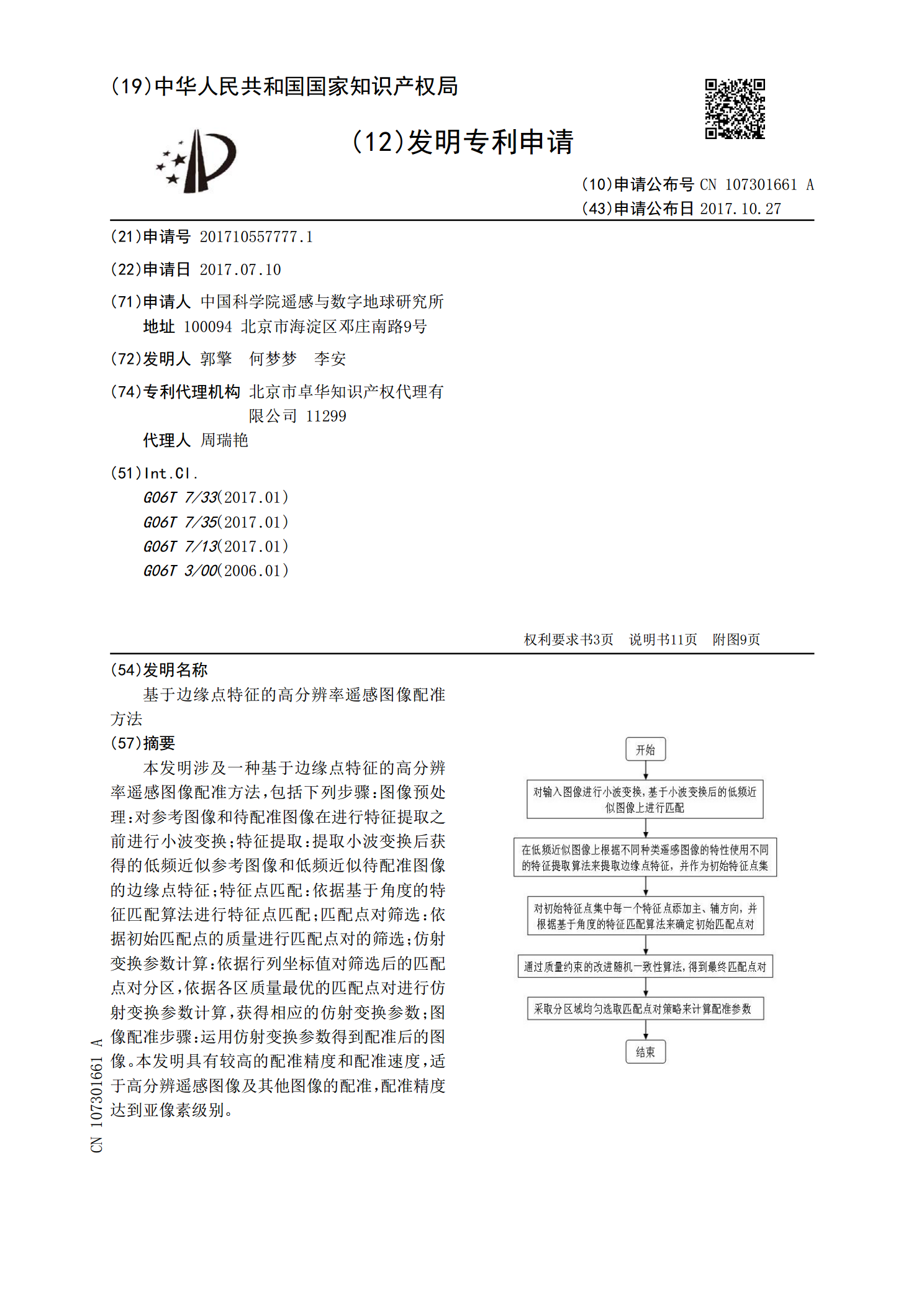
基于边缘点特征的高分辨率遥感图像配准方法.pdf
本发明涉及一种基于边缘点特征的高分辨率遥感图像配准方法,包括下列步骤:图像预处理:对参考图像和待配准图像在进行特征提取之前进行小波变换;特征提取:提取小波变换后获得的低频近似参考图像和低频近似待配准图像的边缘点特征;特征点匹配:依据基于角度的特征匹配算法进行特征点匹配;匹配点对筛选:依据初始匹配点的质量进行匹配点对的筛选;仿射变换参数计算:依据行列坐标值对筛选后的匹配点对分区,依据各区质量最优的匹配点对进行仿射变换参数计算,获得相应的仿射变换参数;图像配准步骤:运用仿射变换参数得到配准后的图像。本发明具有