
一种面阵相机与结构光相机采集图像配准方法.pdf

是你****平呀

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种面阵相机与结构光相机采集图像配准方法.pdf
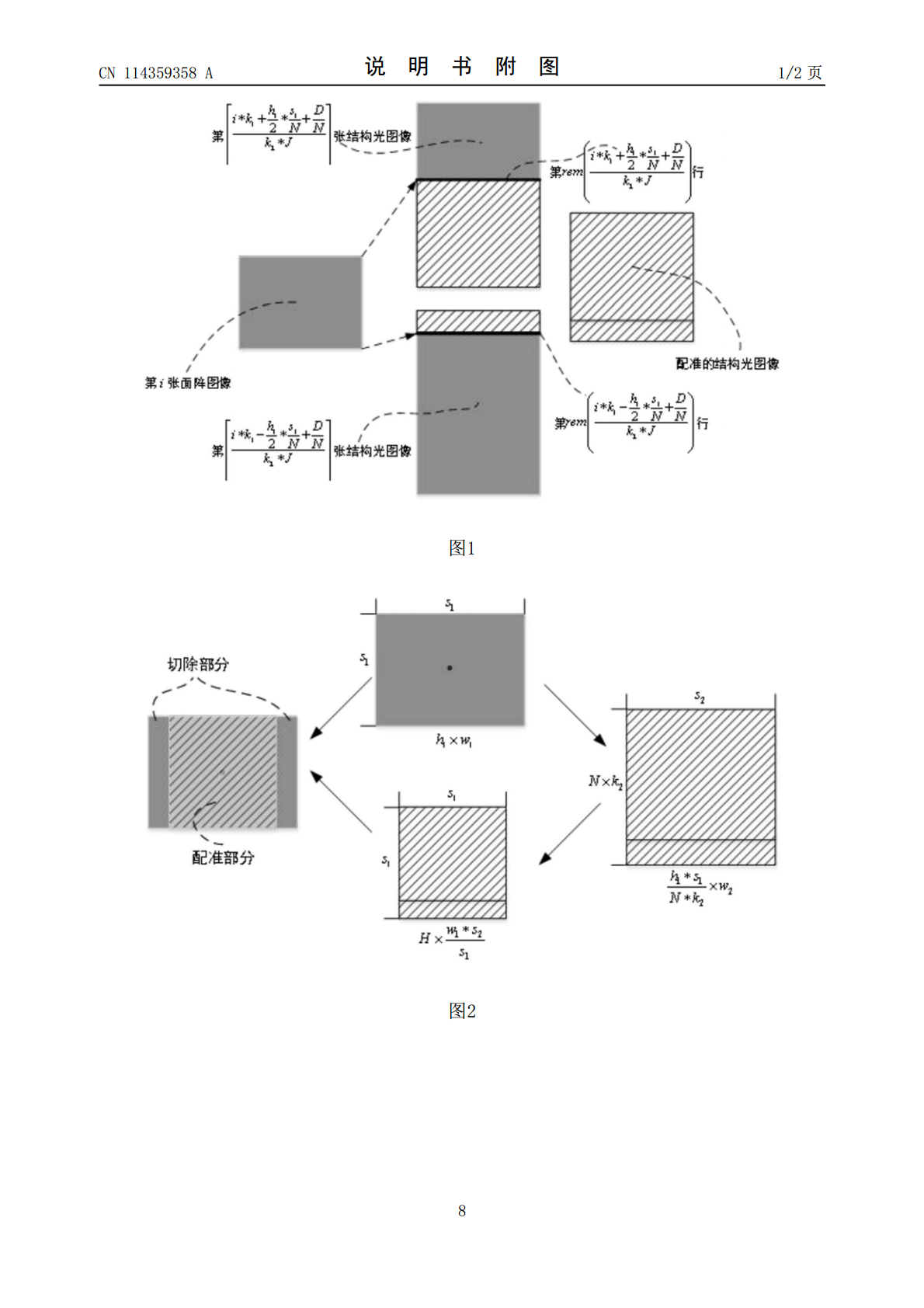
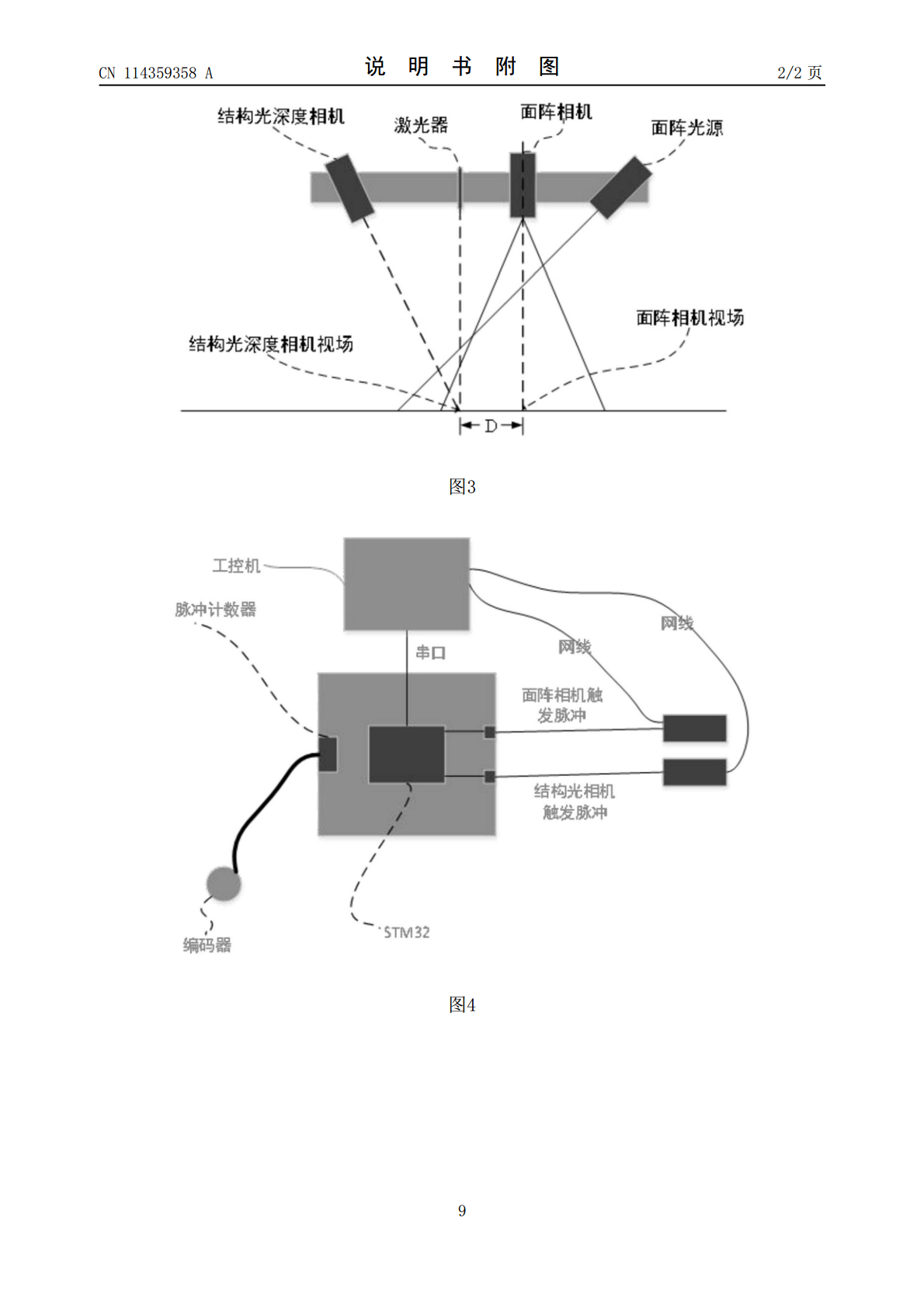
本发明公开了一种面阵相机与光结构相机采集图像配准方法,通过同步采集面阵图像和线扫描图像,应用面阵图像的横纵向像素代表距离稳定的特点,以面阵相机的首行、末行与线扫描图像的具体行进行像素融合,进而进行缩放至同意像素代表距离图像,实现面阵图像和线扫描图像像素的一一对应。实现一一对应的工程价值:1)面阵相机采用彩色成像、线扫描相机采用结构光深度成像时,可以为深度图像各像素进行色彩渲染,获得真彩色三维模型;2)对于配准后的面阵图像、线扫描图像对,可以利用面阵相机成像无错位、扭曲特性,对线扫描图像结合特征匹配等方法进

基于图像配准的空间相机自动对焦的综述报告.docx
基于图像配准的空间相机自动对焦的综述报告现代化的空间相机在太空中的成像任务中具有重要的作用。随着空间技术的发展,空间相机的分辨率和精度要求越来越高。然而,由于太空环境的特殊性和相机自身的限制,如温度和辐射的影响,空间相机自动对焦一直是一个挑战。因此,基于图像配准的空间相机自动对焦成为了一个热门的研究方向。空间相机自动对焦问题可以视为优化问题。通过连续地调整相机的焦距,使得图像的对焦指标达到最佳状态。目前的对焦指标主要有两种,一种是图像清晰度指标,如能量聚焦指标和模糊效应函数,另一种是信噪比(SNR)指标,
一种标定一维面阵相机组相机参数的方法和系统.pdf
本发明公开了一种标定一维面阵相机组相机参数的方法,以获得辅助设备进行定位、加工和检测等操作时所需的相机参数。所述方法包括:采用相机对标定板上的标记点进行拍摄得到所述标记点的图像,所述一维面阵相机组承载于x运动平台;获取所述标记点在所述图像中的位置坐标;根据所述标记点的位置坐标,计算相机与x轴的夹角θ、相机的精度p或相邻两个相机之间的距离d
一种多源相机系统及RGBD配准方法.pdf
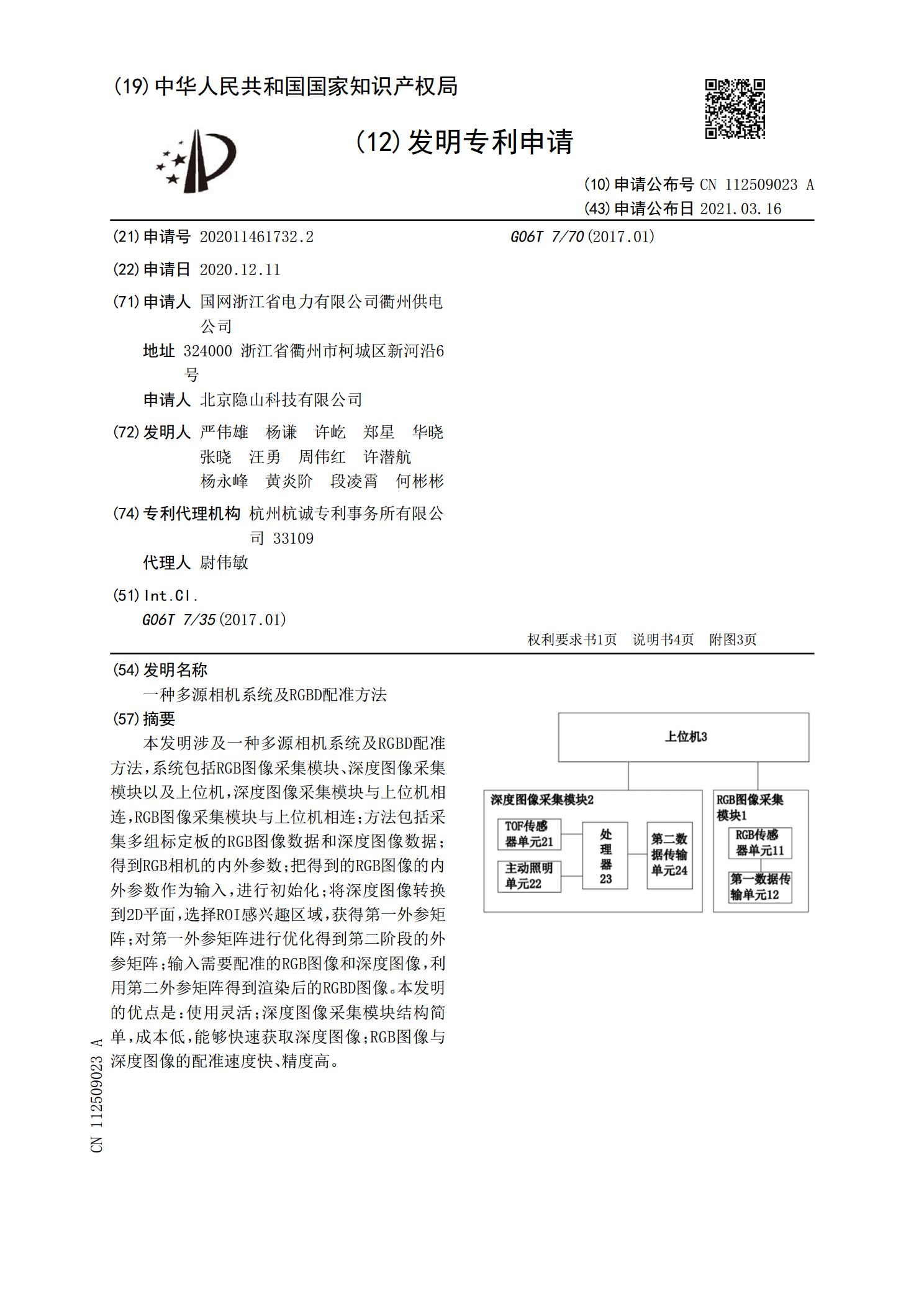
本发明涉及一种多源相机系统及RGBD配准方法,系统包括RGB图像采集模块、深度图像采集模块以及上位机,深度图像采集模块与上位机相连,RGB图像采集模块与上位机相连;方法包括采集多组标定板的RGB图像数据和深度图像数据;得到RGB相机的内外参数;把得到的RGB图像的内外参数作为输入,进行初始化;将深度图像转换到2D平面,选择ROI感兴趣区域,获得第一外参矩阵;对第一外参矩阵进行优化得到第二阶段的外参矩阵;输入需要配准的RGB图像和深度图像,利用第二外参矩阵得到渲染后的RGBD图像。本发明的优点是:使用灵活;
基于可变焦镜头的结构光相机对焦方法及结构光相机.pdf
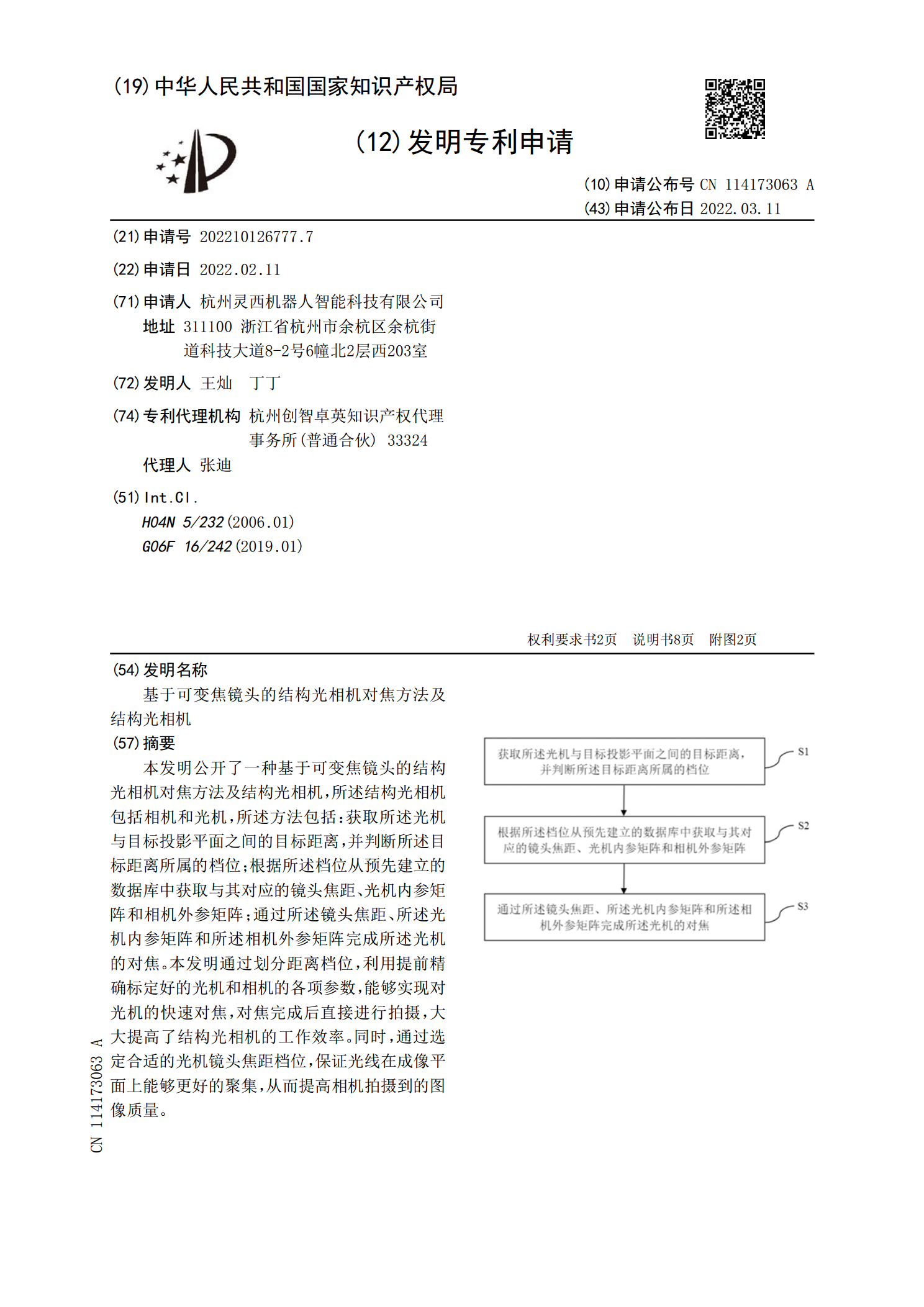
本发明公开了一种基于可变焦镜头的结构光相机对焦方法及结构光相机,所述结构光相机包括相机和光机,所述方法包括:获取所述光机与目标投影平面之间的目标距离,并判断所述目标距离所属的档位;根据所述档位从预先建立的数据库中获取与其对应的镜头焦距、光机内参矩阵和相机外参矩阵;通过所述镜头焦距、所述光机内参矩阵和所述相机外参矩阵完成所述光机的对焦。本发明通过划分距离档位,利用提前精确标定好的光机和相机的各项参数,能够实现对光机的快速对焦,对焦完成后直接进行拍摄,大大提高了结构光相机的工作效率。同时,通过选定合适的光机镜