
短驻留条件下基于多域特征融合的雷达目标稳健识别方法.pdf

慧红****ad

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
短驻留条件下基于多域特征融合的雷达目标稳健识别方法.pdf
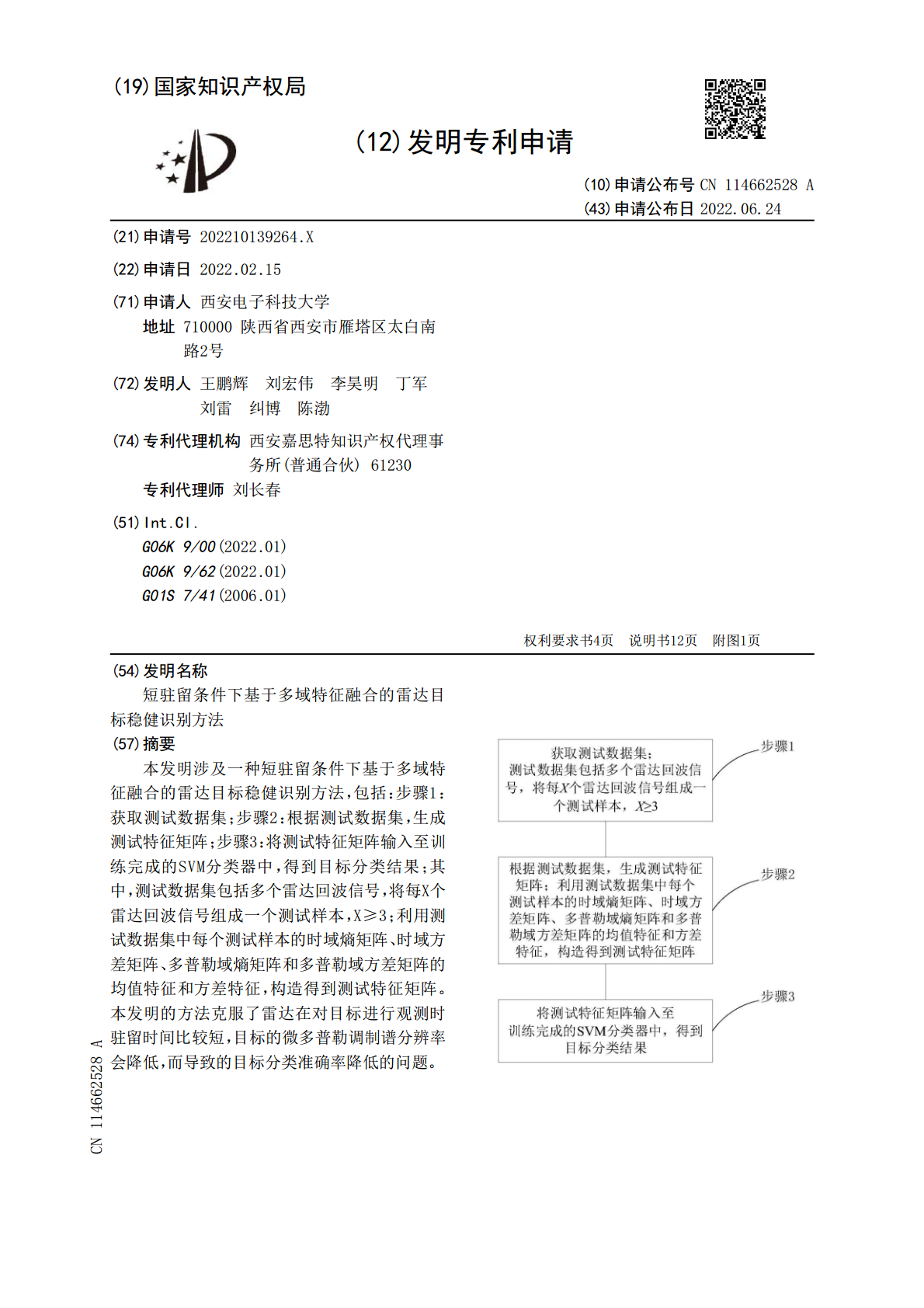
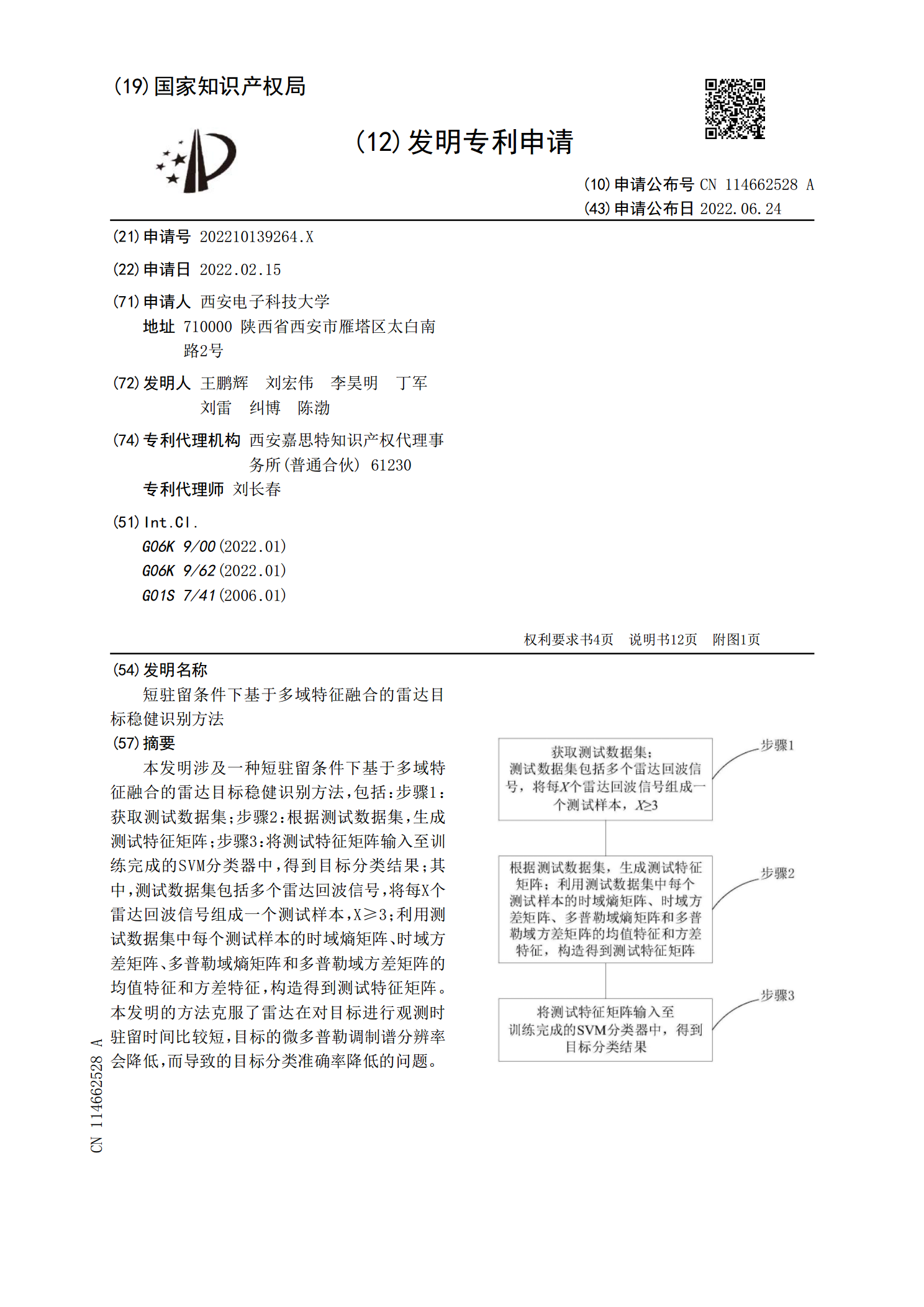
本发明涉及一种短驻留条件下基于多域特征融合的雷达目标稳健识别方法,包括:步骤1:获取测试数据集;步骤2:根据测试数据集,生成测试特征矩阵;步骤3:将测试特征矩阵输入至训练完成的SVM分类器中,得到目标分类结果;其中,测试数据集包括多个雷达回波信号,将每X个雷达回波信号组成一个测试样本,X≥3;利用测试数据集中每个测试样本的时域熵矩阵、时域方差矩阵、多普勒域熵矩阵和多普勒域方差矩阵的均值特征和方差特征,构造得到测试特征矩阵。本发明的方法克服了雷达在对目标进行观测时驻留时间比较短,目标的微多普勒调制谱分辨率会
基于角域特征优化的雷达目标HRRP识别方法.pdf
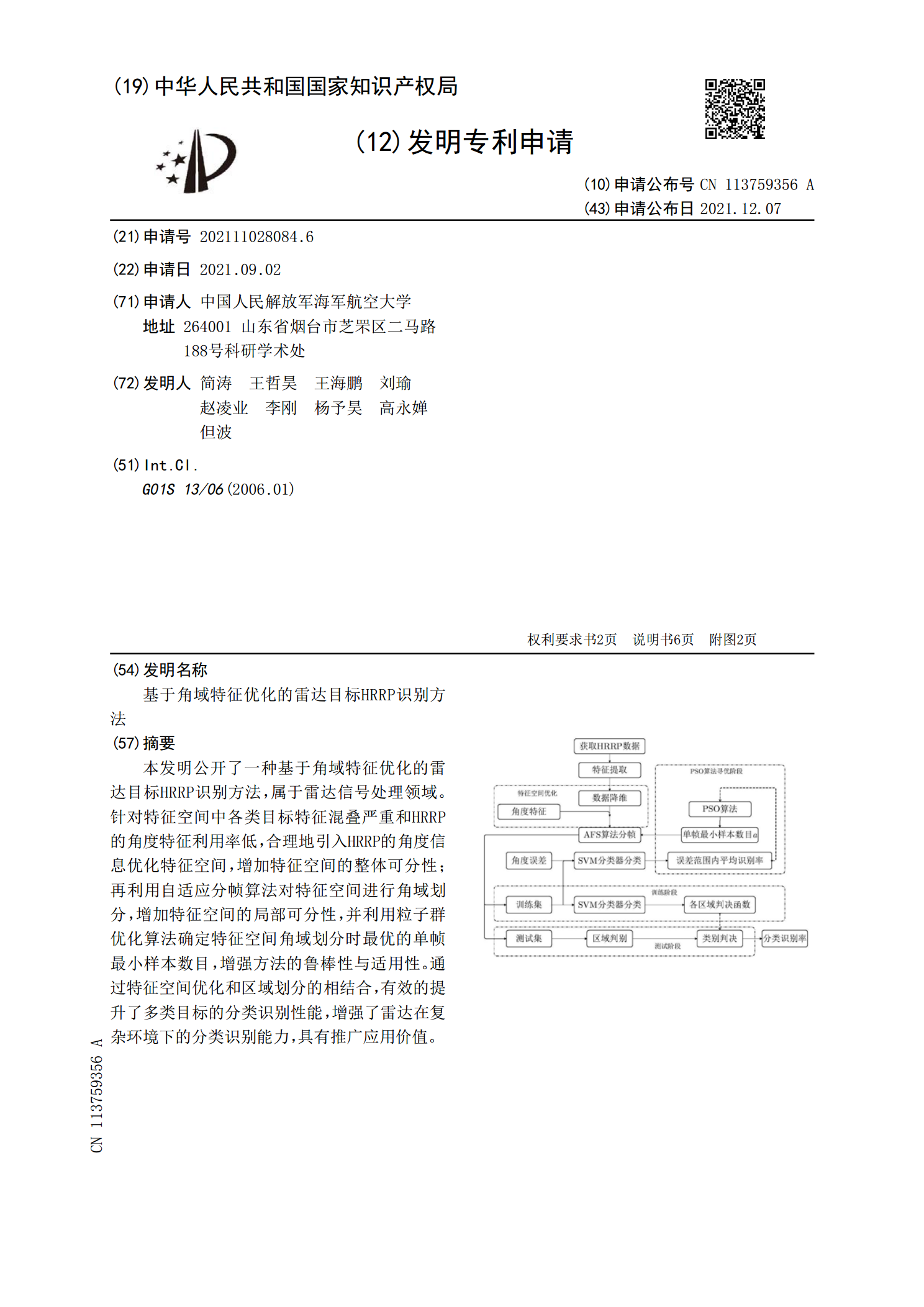
本发明公开了一种基于角域特征优化的雷达目标HRRP识别方法,属于雷达信号处理领域。针对特征空间中各类目标特征混叠严重和HRRP的角度特征利用率低,合理地引入HRRP的角度信息优化特征空间,增加特征空间的整体可分性;再利用自适应分帧算法对特征空间进行角域划分,增加特征空间的局部可分性,并利用粒子群优化算法确定特征空间角域划分时最优的单帧最小样本数目,增强方法的鲁棒性与适用性。通过特征空间优化和区域划分的相结合,有效的提升了多类目标的分类识别性能,增强了雷达在复杂环境下的分类识别能力,具有推广应用价值。

基于多域融合深度学习的毫米波雷达头部动作识别方法.pdf
本发明公开了一种基于多域融合深度学习的毫米波雷达头部动作识别方法,包括以下步骤:步骤1、采集人的头部动作数据;步骤2、预处理,得到时间?距离图、时间?多普勒图;步骤3、对时间?距离图进行特征提取;步骤4、对多通道时间?多普勒图进行特征提取;步骤5、将提取到的距离特征和时频特征混合后,进行二维卷积;步骤6、采用空间注意力机制和通道注意力机制进行权重分配;步骤7、在全连接层中间加入dropout层。本发明利用卷积神经网络,结合多域和多种时频图对毫米波雷达采集的头部动作数据进行分类,同时采用通道注意力机制和空间
基于频域相关性特征的雷达载频变化稳健目标识别方法.pdf
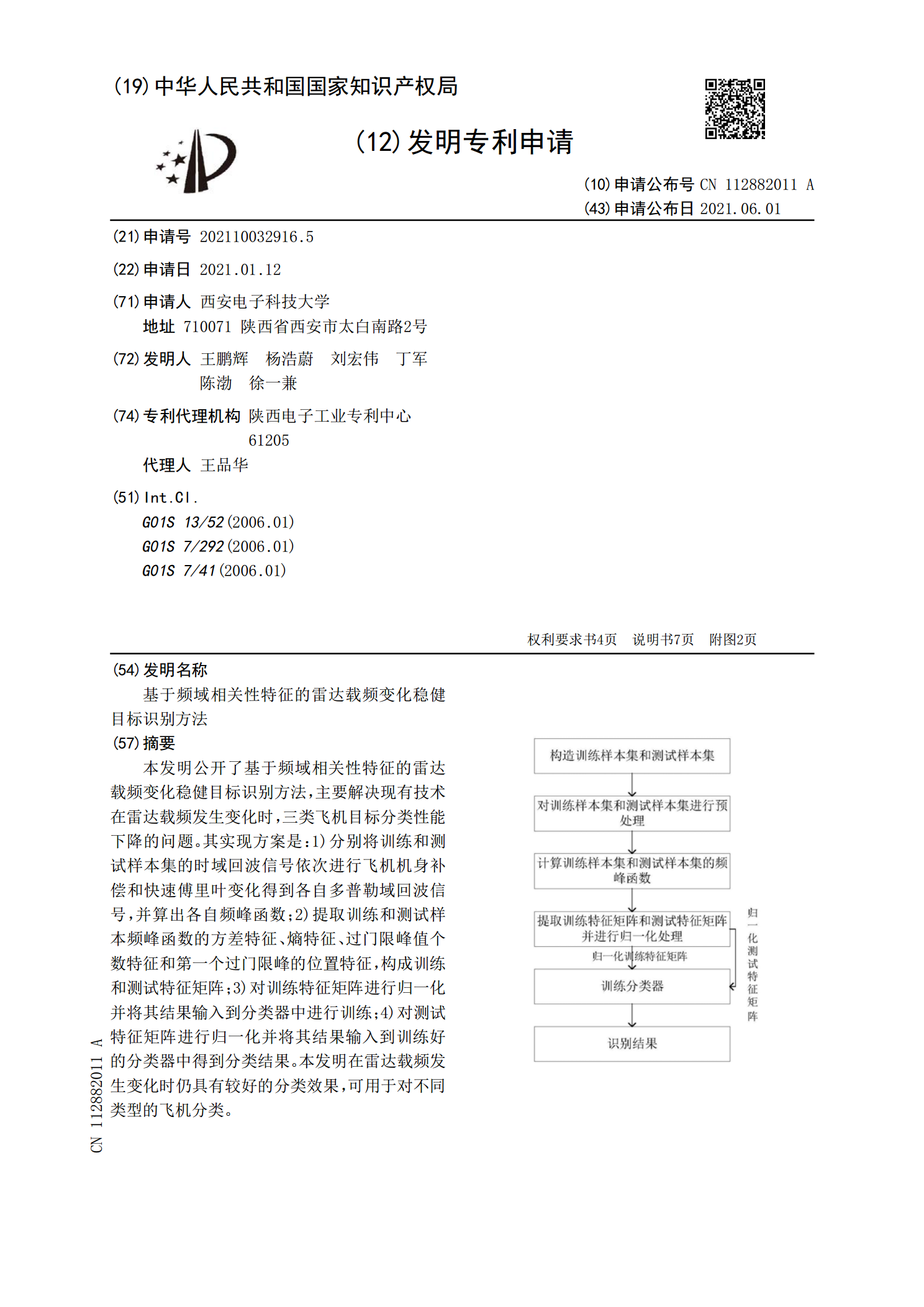
本发明公开了基于频域相关性特征的雷达载频变化稳健目标识别方法,主要解决现有技术在雷达载频发生变化时,三类飞机目标分类性能下降的问题。其实现方案是:1)分别将训练和测试样本集的时域回波信号依次进行飞机机身补偿和快速傅里叶变化得到各自多普勒域回波信号,并算出各自频峰函数;2)提取训练和测试样本频峰函数的方差特征、熵特征、过门限峰值个数特征和第一个过门限峰的位置特征,构成训练和测试特征矩阵;3)对训练特征矩阵进行归一化并将其结果输入到分类器中进行训练;4)对测试特征矩阵进行归一化并将其结果输入到训练好的分类器中
基于卷积神经网络融合特征的雷达目标识别方法及系统.pdf
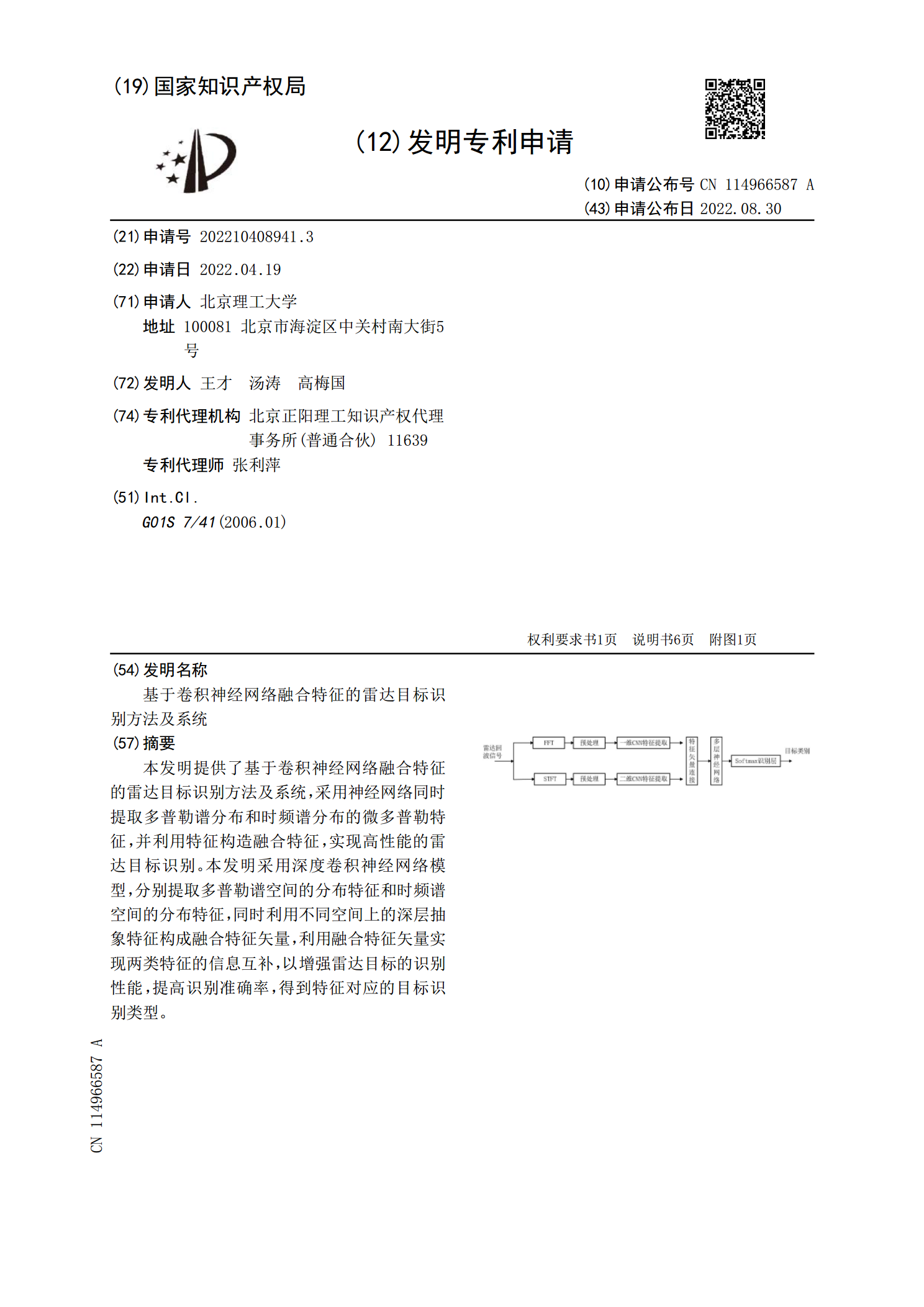
本发明提供了基于卷积神经网络融合特征的雷达目标识别方法及系统,采用神经网络同时提取多普勒谱分布和时频谱分布的微多普勒特征,并利用特征构造融合特征,实现高性能的雷达目标识别。本发明采用深度卷积神经网络模型,分别提取多普勒谱空间的分布特征和时频谱空间的分布特征,同时利用不同空间上的深层抽象特征构成融合特征矢量,利用融合特征矢量实现两类特征的信息互补,以增强雷达目标的识别性能,提高识别准确率,得到特征对应的目标识别类型。