
2023年医学专题—maya骨骼绑定步骤.doc

Jo****31

1/3

2/3
3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

2023年医学专题—maya骨骼绑定步骤.doc
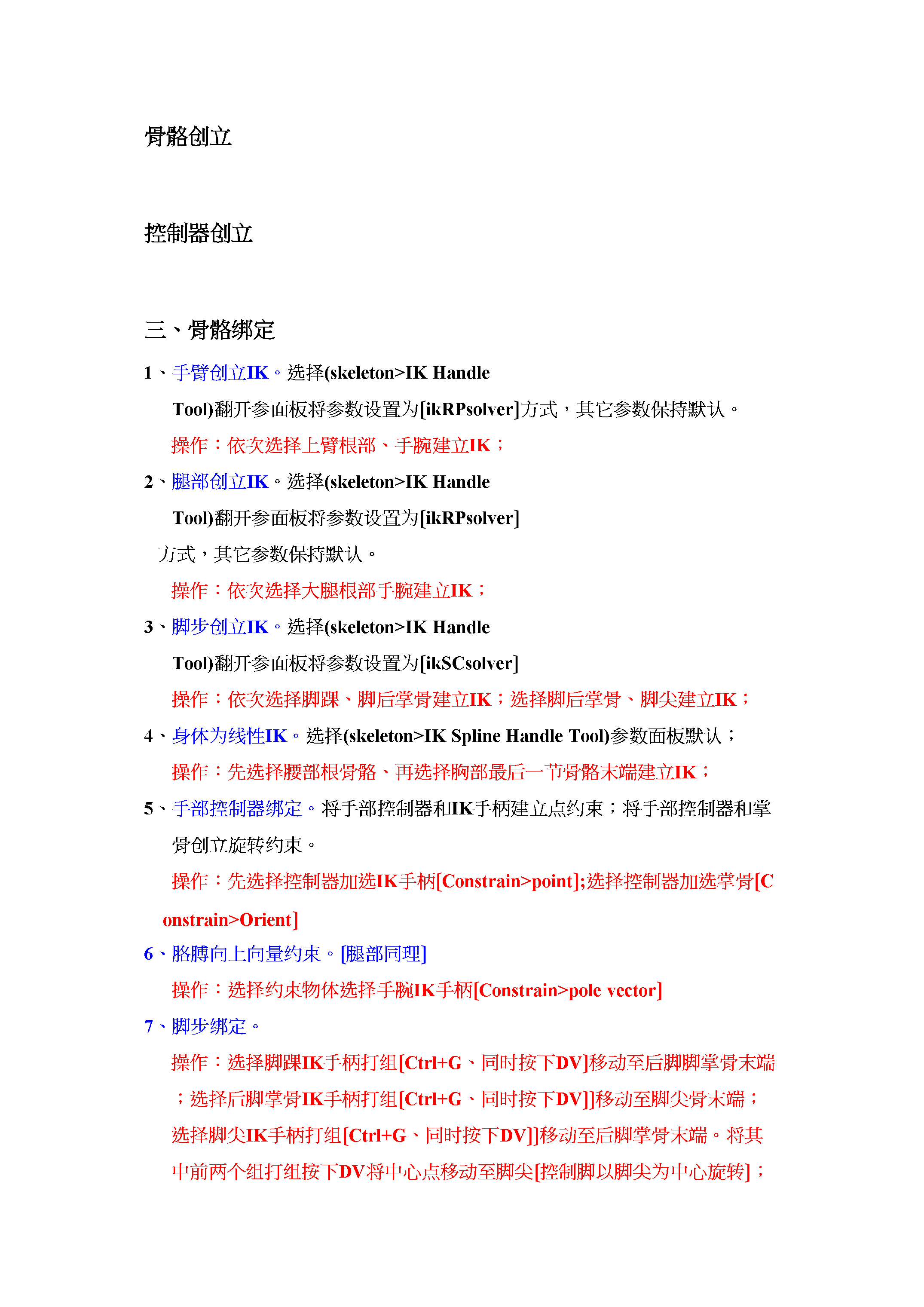
骨骼创立控制器创立三、骨骼绑定手臂创立IK。选择(skeleton>IKHandleTool)翻开参面板将参数设置为〔ikRPsolver〕方式其它参数保持默认。操作:依次选择上臂根部、手腕建立IK;腿部创立IK。选择(skeleton>IKHandleTool)翻开参面板将参数设置为〔ikRPsolver〕方式其它参数保持默认。操作:依次选择大腿根部手腕建立IK;脚步创立IK。选择(skeleton>IKHandleTool)翻开参面板将参数设置为〔ikSCsolver〕操作:依次选择

【精编医学资料】maya骨骼绑定步骤.doc
骨骼创建控制器创建三、骨骼绑定手臂创建IK。选择(skeleton>IKHandleTool)打开参面板将参数设置为(ikRPsolver)方式其它参数保持默认。操作:依次选择上臂根部、手腕建立IK;腿部创建IK。选择(skeleton>IKHandleTool)打开参面板将参数设置为(ikRPsolver)方式其它参数保持默认。操作:依次选择大腿根部手腕建立IK;脚步创建IK。选择(skeleton>IKHandleTool)打开参面板将参数设置为(ikSCsolver)操作:依次选择

maya骨骼绑定详细教程.docx
maya骨骼绑定详细教程一、概述Maya作为一款功能强大的三维动画和建模软件,广泛应用于影视特效、游戏开发、广告制作等领域。在Maya中,骨骼绑定是实现角色动画的关键步骤之一,它能够让模型在运动时更加自然、流畅。通过为模型创建骨骼系统,并将骨骼与模型的顶点进行绑定,我们可以轻松控制模型的姿态和动作,实现各种复杂的动画效果。在本教程中,我们将详细介绍Maya中骨骼绑定的流程和技巧。我们将了解骨骼绑定的基本原理和常用工具;接着,我们将学习如何为模型创建骨骼系统,包括骨骼的创建、命名和层级关系的设置;我们将探讨

maya教程骨骼绑定蒙皮动画.docx
maya教程骨骼绑定蒙皮动画一、概述《Maya教程:骨骼绑定蒙皮动画》是一篇针对三维动画软件Maya的深入教程,旨在帮助读者掌握骨骼绑定与蒙皮动画的关键技术。骨骼绑定是动画制作的重要环节,它通过将虚拟骨骼与模型相结合,为模型提供运动的骨架,从而实现生动的动画效果。而蒙皮动画则是将绑定好的骨骼与模型表面皮肤进行关联,使模型在运动时能够呈现出更加自然、逼真的形态变化。本教程将从基础知识讲起,介绍Maya中骨骼绑定的基本原理和操作步骤,包括如何创建骨骼、调整骨骼权重、设置约束等。我们还将深入探讨蒙皮动画的技巧和
MAYA骨骼绑定专项期末考试.doc
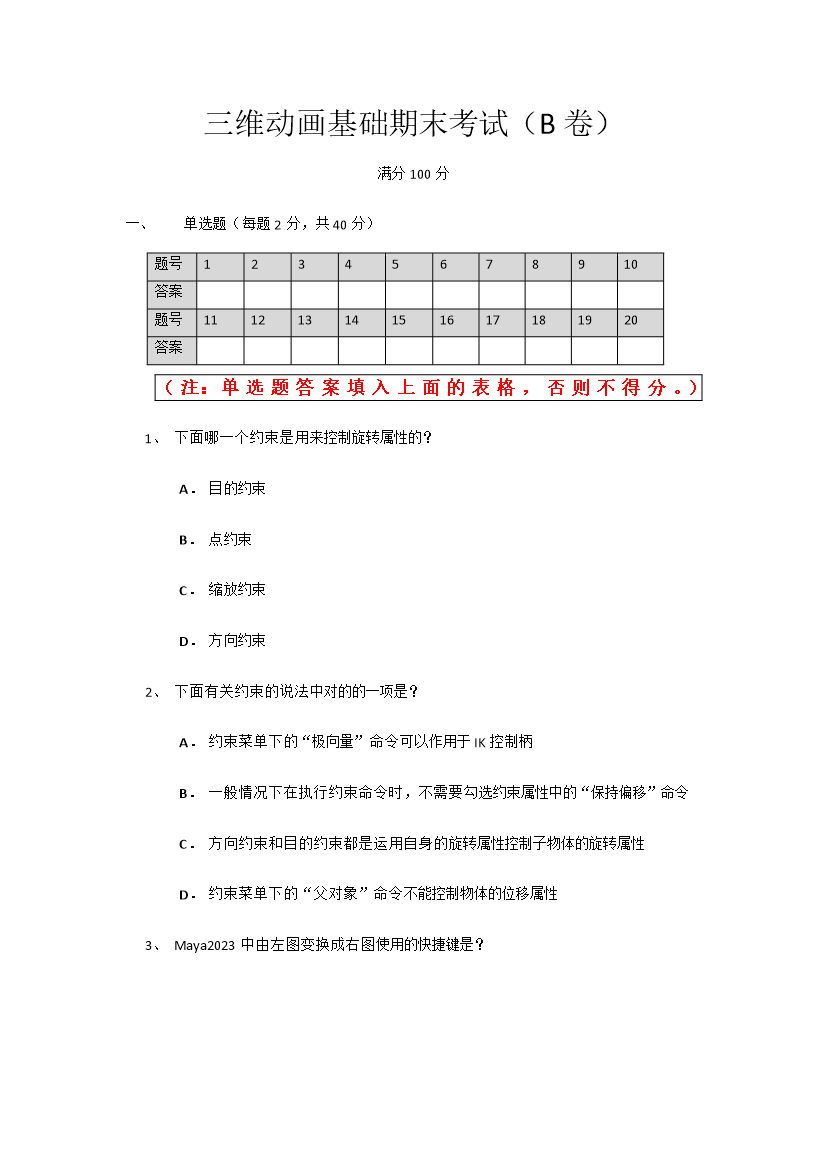
三维动画基础期末考试(B卷)满分100分单选题(每题2分,共40分)题号12345678910答案题号11121314151617181920答案(注:单选题答案填入上面的表格,否则不得分。)下面哪一个约束是用来控制旋转属性的?目的约束点约束缩放约束方向约束下面有关约束的说法中对的的一项是?约束菜单下的“极向量”命令可以作用于IK控制柄一般情况下在执行约束命令时,不需要勾选约束属性中的“保持偏移”命令方向约束和目的约束都是运用自身的旋转属性控制子物体的旋转属性约束菜单下的“父对象”命令不能控制物体的位移属